專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





智能(néng)工廠是實現智能(néng)制造的關鍵環節。在智能(néng)工廠中,智能(néng)設備得到了廣泛的應用,AGV、智能(néng)機械手等智能(néng)搬運設備組成(chéng)了智能(néng)生産物料系統。多搬運載體間的協同作業對(duì)智能(néng)工廠的正常運轉具有十分重要的意義。近年來,多搬運載體間的協同作業研宄成(chéng)爲物流領域的關注熱點,國(guó)内外學(xué)者針對(duì)協同問題開(kāi)展了大量研究。
在搬運載體協同研宄方面(miàn),陳敏等[1]針對(duì)智能(néng)車間中多AGV的調度問題進(jìn)行研宄,提出7個調度運行機制,通過(guò)運用PlantSimulation對(duì)進(jìn)行仿真,驗證調度方案的合理性。賀長(cháng)征等[2]針對(duì)柔性制造車間中AGV和加工設各的協同調度問題,建立雙資源優化數學(xué)模型,設計了“時間窗+Dijkstra+遺傳算法的混合算法進(jìn)行求解,并采用了3種(zhǒng)規則解決最優路徑規劃中的沖突問題。劉旭等[3]建立以AGV工作過(guò)程中行駛時間最短的數學(xué)優化模型,對(duì)遺傳算法的交叉變異算子改進(jìn),求解獲取多AGV協同調度的最佳方案。嶽笑凸等研宄面(miàn)向(xiàng)柔性制造系統中多自動牽引小車的協同調度問題,考慮小車的續航能(néng)力因素,以任務的最小完成(chéng)時間和車輛數最少使用量爲調度目标,采用混合遺傳一粒子群算法進(jìn)行求解,并通過(guò)仿真驗證模型和算法有效性。AbdelmaguidTF等[5]研究加工設備和多AGV雙資源間的協同優化,以最大任務結束時間爲優化目标,提出一種(zhǒng)新的混合遺傳算法編碼方案進(jìn)行求解,通過(guò)82組實驗算例,驗證模型和編碼方案的性能(néng)優劣性。
在路口避碰研究方面(miàn),胡傑傑[6]針對(duì)智能(néng)車間柔性物理,設計了集中式的AGV群控協調算法,賦予AGV任務優先級,解決節點處的沖突問題。肖萌[7]針對(duì)多AGV沖突問題以高優先級優先通過(guò)爲原則,提出沖突判據方法和主軌道(dào)雙向(xiàng)并行避碰策略,通過(guò)仿真驗證和實現該方法。肖海甯等[8]研宄單向(xiàng)引導路的AGV系統,建立基于有向(xiàng)圖的AGV系統模型,基于此提出路徑鎖死的破解規則,通過(guò)PIantSimuIation仿真驗證其有效性。喬岩等[9]研宄在動态變動環境下,針對(duì)AGV臨時改變行進(jìn)路線的清況,在交叉節點對(duì)AGV的優先級進(jìn)行動态調整AGV通過(guò)路口順序,并以此更新AGV路線,以改進(jìn)時間窗算法進(jìn)行仿真實驗,證明方法的具備更好(hǎo)的魯棒性和高效率性。
目前的研究多爲考慮單資源和雙資源的協同問題,在三資源協同作業方面(miàn)研宄較少,在協同研宄中考慮搬運載體路口避碰的研宄也較少。本文考慮倉庫存取貨的堆垛機、工位間搬運物料的AGV和線邊裝卸物料的機械手三資源的協同作業中,同時設計多AGV在交叉路凵的可同時通行的避碰規則,優化整個作業車間的物流作業效率。
針對(duì)智能(néng)工廠中多搬運載體的協同作業問題,以倉庫存取貨的堆垛機、工位間搬運物料的AGV和線邊裝卸物料的機械手爲研究對(duì)象,研究堆垛機.AGV.線邊機械
手三個資源協同執行運輸任務的同時,考慮多AGV在交叉路口的避碰問題,建立以最大完工時間最小化的數學(xué)規劃模型,并建立成(chéng)本懲罰函數作爲輔助優化模型。車間物流作業流程如圖1所示,AGV n ,在倉庫前的物料交接點等待堆垛機將(jiāng)物料從立體倉庫搬運到AGV m 上,由AGV。選擇最優路徑(紅色路徑)將(jiāng)物料運輸到需求工位旁的交接點,由機械手進(jìn)行卸載。
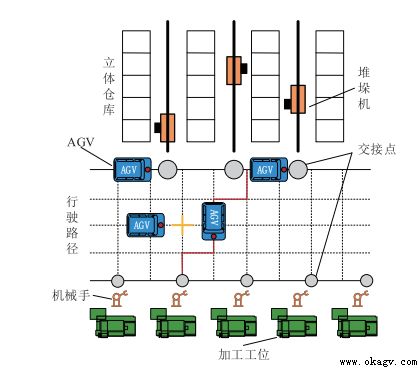
圖1 車間多搬運載體協作流程圖
根據智能(néng)車間的實際情況,爲了便于模型求解分析以及考慮AGV交叉路口的碰撞情形,對(duì)問題進(jìn)行合理的假設與簡化:
1)AGV在空載和負載的情況下均爲勻速行駛;
2)不考慮AGV加速和減速過(guò)程;
3)搬運載體車況良好(hǎo)且均有額定容量;
4)AGV的任務執行過(guò)程爲連續的,不存在中斷的情況;
5)AGV可同時接受多個任務,依次執行;
6)考慮AGV在路口的碰撞和堵塞情況;
7)堆垛機和機械手的操作時間和裝卸順序爲己知;
8)各搬運載體間相互獨立,不存在約束情形;
9)小車在容量充足的情況下,可搬運多個物料或工件;
10)同類型搬運載體的工作能(néng)力指标相同。
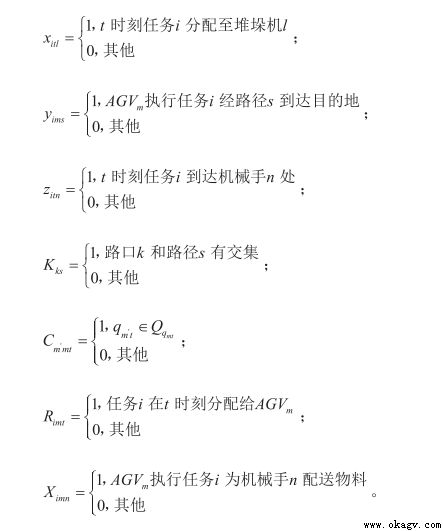
H:表示路徑節點的集合,h=1,2,···,H;I:表示任務的合集,i=1,2,···,L:表示堆垛機的集合,i=1,2,···,L;M:表示AGV的集合,m=1,2,•••,M;N:表示機械手的集合,n=1,2,···,N;S:表示路徑的集合.s=1,2,···,S:K:表示路口的合集,k=1,2,···,K:Ti:表示任務i的完工時間;T1:表示堆垛機執行完單個任務所需的平均時間;Tn:表示機械手執行完單個任務所需的平均時間;TLi:表示堆垛機I開(kāi)始執行任務i的時刻;Eni:表示機械手n執行完任務i的時刻;Ti:表示機械手n開(kāi)始執行任務i的時刻:Tilm:表示AGVm開(kāi)始執行堆垛機1執行完的任務i的時刻;qms:表示AGV。行駛的距離;Vm:表示AGV。的行駛速度;t1mn:表示AGVm從堆垛機行駛至機械手n所需的時間;qms表示AGVm在交叉路口所處的相位;Qqms:表示AGm在交叉路口所處相位的集合。
tim:AGVm執行完任務i時刻;
爲實現車間工作效率最大化和物料送達時間誤差最小,本文提出智能(néng)車間多搬運載體協同作業的兩(liǎng)個優化目标,構建完工時間和懲罰成(chéng)本均最低的多目标優化函數。
minZ=max{Ti} (1)
其中
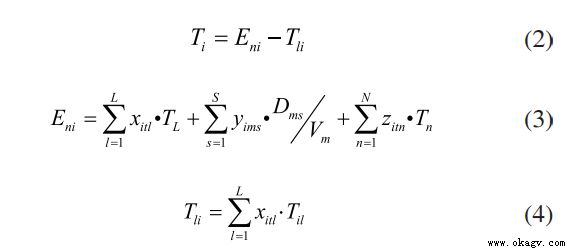
式中,Ti表示任務i的完工時間,T1i表示堆垛機1開(kāi)始執行任務i的時刻,Eni表示機械手n執行完任務i的時刻,整體優化目标爲最大完工時間最小化。
針對(duì)物料送達過(guò)程可能(néng)出現的提前送達、準時送達和延遲送達三種(zhǒng)情況,本文對(duì)三種(zhǒng)送達情況建立相應的成(chéng)本懲罰函數,并作爲第二個優化目标,如式(5)所示。
minC=min{f(tim)} (5)
其中,考慮到物料運輸延遲送達對(duì)項目進(jìn)度的影響損失比物料運輸提前送達對(duì)項目進(jìn)度的影響損失更爲嚴重,同時爲增強資源配置過(guò)程中的柔性[10,11],建立如圖2所示的曲線型軟時間窗成(chéng)本懲罰函數。
假設最佳到達的時間窗爲[ta,tb],在此基礎上,可偏離得到可接受服務時間窗[t'a,t'b],其中,t'a=ta-Δ1,t'b=tb+Δ2。若AGVm在[ta,tb]内將(jiāng)物料送達指定工位,懲罰成(chéng)本爲0;若AGVm在[t'a,t'b]或[tb,t'b]内將(jiāng)物料送達指定工位,隻需承擔較少的懲罰成(chéng)本;若AGVm在(0,t'a)或(t'b,∞ )内將(jiāng)物料送達指定工位,則需要承擔較多的懲罰成(chéng)本。基于曲線型軟時間窗的成(chéng)本懲罰函數如式(6)所示。
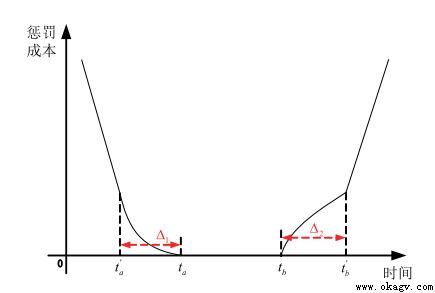
圖2 基于曲線型軟時間窗的懲罰成(chéng)本函數
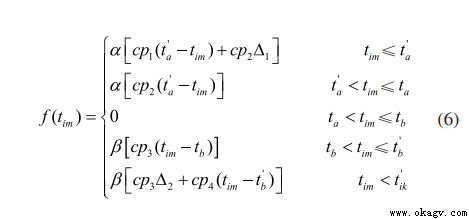
式(6)表示在曲線型軟時間窗的約束下,AGVm執行完任務i的時刻tim所對(duì)應的懲罰成(chéng)本。如圖2所示,若AGVm在t'a時刻之前送達,單位時間所需承擔的懲罰成(chéng)本爲cp1,同時還(hái)需要承擔[t'a,ta]時間段所産生的懲罰成(chéng)本;若AGVm在[t'a,ta]時間段内送達,單位時間所需承擔的懲罰成(chéng)本爲cp2;若AGVm在[ta,tb]時間段内送達,懲罰成(chéng)本爲0;若AGVm在[tb,t'b]時間段内送達,單位時間所需承擔的懲罰成(chéng)本爲cp3;若AGVm在t'b時刻以後(hòu)送達,對(duì)應的單位時間所需承擔的懲罰成(chéng)本爲cp4,同時還(hái)需承擔[tb,t'b]時間段所産生的懲罰成(chéng)本。
式中,α和β爲提前送達和延遲送達的成(chéng)本懲罰權重,分别取值爲0.1和0.8[12]。
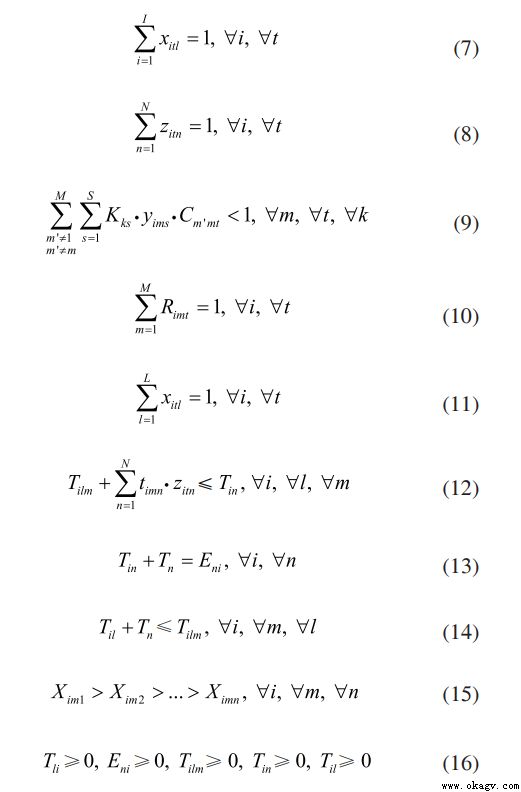
其中,式(7)表示任何時刻一台堆垛機隻能(néng)被(bèi)分配一個任務;式(8)表示任意時刻同一任務隻能(néng)被(bèi)分配給一個加工工位;式(9)表示兩(liǎng)台相位相沖突的AGV不能(néng)同時通過(guò)路口;式(10)表示每個任務在同一時刻隻能(néng)由一台AGV執行;式((1)表示每個任務在任意時刻隻能(néng)分配給一個堆垛機;式(12)表示機械手開(kāi)始處理的時刻不得早于AGV將(jiāng)物料送達機械手所在交接點的時刻:式(13)表示任務被(bèi)完成(chéng)的時刻;式(14)表示隻有在堆垛機將(jiāng)物料卸載在交接點後(hòu),AGV才能(néng)開(kāi)始執行任務;式(巧)表示每台AGV待執行的任務需依次排序執行:式(16)表示參數的非負限制。
路口碰撞可分爲相向(xiàng)沖突、路口沖突和節點占用沖突三種(zhǒng)[13]。傳統路口避碰爲題大多賦予AGV不同級别的優先級,按優先級高低依次通過(guò),單次隻能(néng)通過(guò)一輛AGV[13]。本文研宄中,爲使AGV避碰環節更貼近實際,AGV在行駛過(guò)程中經(jīng)過(guò)某交叉路口時,根據傳感器和RFID采集的數據,分析當前路口的通行情況和路口AGV行駛信息,通過(guò)檢測每輛AGV的行駛方向(xiàng),判斷多輛AGV的是否可同時通行,并對(duì)相沖突的AGV進(jìn)行優先級調整,使路口可同時通行多輛AGV,有效減少等待時間和碰撞情況的産生。
AGV行駛臨近交叉路口時,根據傳感器和RFID采集的數據,控制系統對(duì)AGV位置和時間狀态進(jìn)行更新,檢測并分析在即將(jiāng)駛入的路口是否會(huì)發(fā)生沖突及其沖突類型。
檢測中參數定義如下:
1)λbm爲表示AGVm到達節點h的時間;
2)εhm爲表示AGVm在節點h的停留時間;
3)θ爲表示沖突檢測時的安全時間間隔阈值;
4)Kmh爲節點h的識别碼,且該節點在AGVm的規劃行駛路徑中;
5)Kmh-1<Kmh<Kmh+1爲AGVm通過(guò)的節點順序。
沖突檢測模型如下:
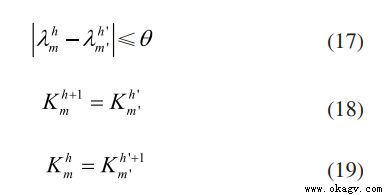
1)相向(xiàng)沖突
若檢測過(guò)程中滿足以下關系式(17)、式(18)、式(19),則AGV在路口將(jiāng)發(fā)生相向(xiàng)沖突。
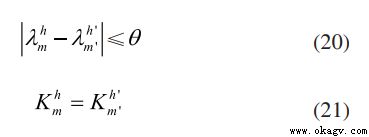
2)路口沖突
若檢測過(guò)程中滿足以下關系式(20)和式(21),則AGV在下一路凵將(jiāng)發(fā)生路口沖突。
3)節點占用
若檢測過(guò)程中滿足以下關系式(22)和式(23),則AGV在下一路口將(jiāng)發(fā)生節點沖突。
如圖3所示,AGVm行駛至交叉路口時,每輛AGVm均有gs、tl、tr三種(zhǒng)行駛方向(xiàng)的可能(néng)性,分别代表直行、左轉、直行,在路口設置互容和不容兩(liǎng)種(zhǒng)通行相位,處于互容相位的多輛AGV可在不碰撞的情況下同時通過(guò),處于不容相位的多輛AGV不能(néng)同時通過(guò)路口,(假設路口的轉彎半徑可同時容納兩(liǎng)輛互容相位的AGV同時通過(guò))。比如AGVtrm1則表示AGVm1在路口右轉,則與AGVtlm2、AGVtrm2、AGVtrm3、AGVgsm2、AGVtrm4、AGVgsm4是互容相位,可同時通過(guò)路口,與AGVgsm2、AGVtlm3、AGVtlm4是不容相位,不可同時通過(guò)路口,其通過(guò)路口順序需根據優先級調整确定。
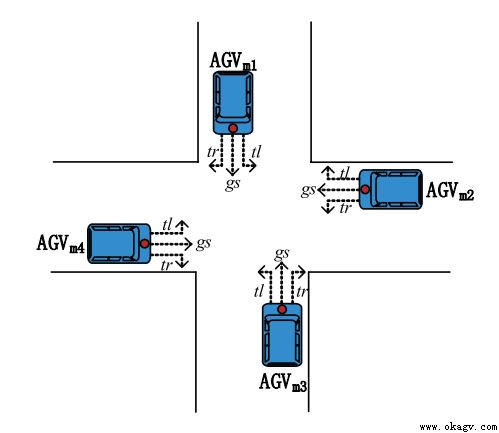
圖3 AGV在路口的沖突相位圖
在交叉路口處于不容相位的AGV,爲保證各AGV之間有明确的優先關系,通過(guò)賦予AGV優先級來确定通路口的先後(hòu)順序,其依據是根據理論上AGV完成(chéng)正在執行任務的剩餘時間,值越小,則AGV優先級越大,不同的優先級以增幅A來确定,若是空載車輛,優先級則設爲最低。
其中:
式中,rest(Ti)表示任務i的剩餘完工時間;Number(k)表示當前路口排隊不容相位排隊通行的車輛數。
爲減少雙路口之間路徑的堵塞現象,當AGV即將(jiāng)抵達雙路口路徑時,在檢測交叉路口沖突情況的同時,檢測雙路口之間路徑堵塞情況,評估當前是否可以進(jìn)入該路徑而不造成(chéng)堵塞,如圖4所示,評估标準爲路徑剩餘可容納的車輛數:
N(s)=F[ s ]-Y(s) (25)
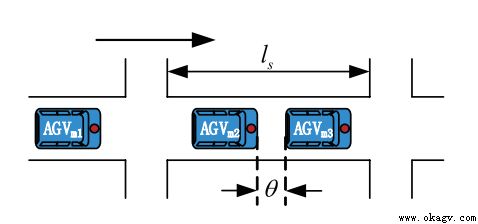
圖4 雙路口路徑容量檢測示意圖
式中,N(s)爲路徑s的剩餘可容納的車輛數;F(s)爲路徑可容納車輛的額定容量,取值向(xiàng)下取整;Y(s)爲路徑s中己進(jìn)入的車輛數;ls爲路徑s的長(cháng)度;
lAGVm爲AGVm的長(cháng)度,θ爲行車過(guò)程中的最小安全距離。
當N(s)<1時,將(jiāng)禁止AGV通過(guò)交叉路口,等待直至有AGV從路徑駛出。
PSO是Kennedy和Eberhart受鳥群群體運動的啓發(fā)于1995年提出的一種(zhǒng)新的群智能(néng)優化算法[14],通過(guò)粒子間的信息共享,協作完成(chéng)尋優任務,具有記憶性強、效率
高和搜索速度快等特點,但易陷入局部最優,即局部尋優能(néng)力強,全局尋優能(néng)力弱[15]。本文對(duì)粒子群算法進(jìn)行優化,采用動态慣性權重和引入遺傳算法中的自适應變異概率,避免算法後(hòu)期陷入局部最優,提升算法的收斂能(néng)力和收斂精度,算法流程如圖5所示。
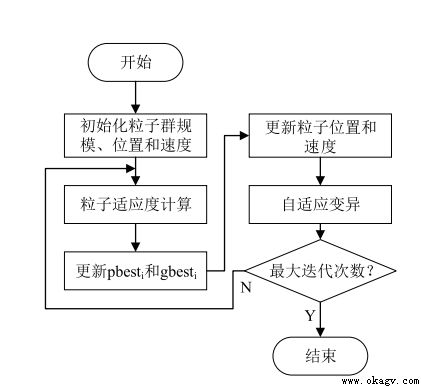
圖5優化自适應粒子群算法流程圖
設求解模型的維度爲D維,有1個粒子,粒子群爲L={p1,p2,…,pi,…,pl}速度表示爲V={v1,v2,…,vi,…,vD},位置表示爲X={x1,x2,…,xi,…,xD},pbesti表示粒子i經(jīng)過(guò)的最佳位置,gbesti表示所有粒子經(jīng)曆過(guò)的最佳位置。PSO算法的粒子i的第D維速度更新公式爲式(27),粒子i的第D維位置公式爲式(28):
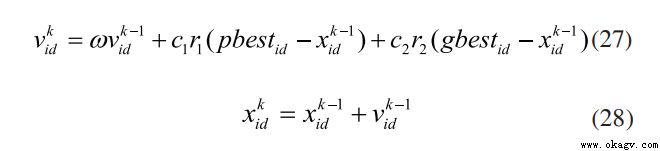
式中,vkid表示粒子i進(jìn)行第k次叠代時速度矢量的第D維分量;vkid表示粒子i進(jìn)行第k次叠代時位置矢量的第D維分量;c1,c2表示學(xué)習因子加速度,其值爲常數;r1,r2爲取值範圍爲[0,1]的兩(liǎng)個随機參數;w表示慣性權重,取值非負,用來調節對(duì)解空間的搜素範圍。
慣性權重表示粒子i的先前速度對(duì)當前速度的影響。全局尋優能(néng)力與其值成(chéng)正比,局部尋優能(néng)力與其值成(chéng)反比;反之,粒子局部尋優能(néng)力強,全局尋優能(néng)力弱。即,值過(guò)大,則容易錯過(guò)最優解;值過(guò)小,則算法收斂速度慢或是容易陷入局部最優解。當問題空間較大時,爲了在搜素速度和搜索精度之間達到平衡,故本文采用動态慣性權重式(29),使算法在叠代初期有較高的全局搜索能(néng)力以得到合适的種(zhǒng)子,而在後(hòu)期有較高的局部搜索能(néng)力以提高收斂精度,随著(zhe)叠代次數地增加,w不斷減小,進(jìn)而使算法在初期有較強的全局收斂能(néng)力,而後(hòu)期有較強的局部收斂能(néng)力。
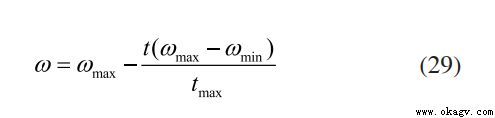
式中,wmax表示最大慣性權重;wmin表示最小慣性權重;t表示當前叠代次數;tmax表示算法最大叠代次數。
在算法叠代初期,種(zhǒng)群個體的差異性較大,爲避免産生不良解,同時爲使算法快速收斂,應以較小的概率進(jìn)行變異。在叠代後(hòu)期,種(zhǒng)群個體多樣(yàng)性逐漸降低,爲避免算法陷入局部最優[14],應以增大個體的變異率。
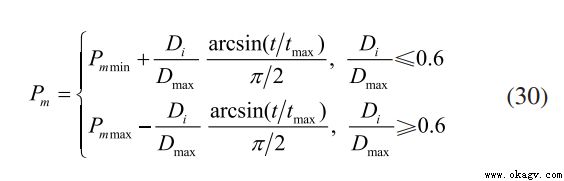
式中,Pmmin表示最小的變異概率,取值爲0.01;Pmmax表示最大的變異概率,取值爲0.1。t表示當前的叠代次數;tmax表示最大的叠代次數;Di表示粒子i到當前最優解的歐氏距離;Dmax表示種(zhǒng)群中離當前最優解最遠的粒子i的最大歐氏距離。
以電氣配件制造車間爲例進(jìn)行本文的實例驗證。該車間的電氣配件制造工序包括鉚接、壓線、點焊、攻牙、噴印、移印、預裝配、總裝配等。該廠裝配車間有一個原料倉庫,其中包括4個立體倉庫,3個堆垛機,車間有15個加工工位,編号1-15,車間呈S型分布,分布步長(cháng)爲5米,每個加工工位前有1台線邊機械手,6台激光引導式AGV。AGV負責原料和在制品的配送。該車間個搬運設備參數如表1所示,各工作站點間的車輛行駛時間如表2所示,0表示原料倉庫,各加工工位間的距離如表2所示。
本文以固定的搬運任務數和固定使用的AGV數分别進(jìn)行實驗,并分别考慮在交叉路口避碰和不考慮避碰的兩(liǎng)種(zhǒng)情況進(jìn)行對(duì)照。算例1搬運任務爲40,堆垛機數3,AGV數爲3;算例2搬運任務爲40,堆垛機數3,AGV數爲6;算例3搬運任務爲70,堆垛機數3,AGV數爲3;算例4搬運任務爲70,堆垛機數3,AGV數爲6。
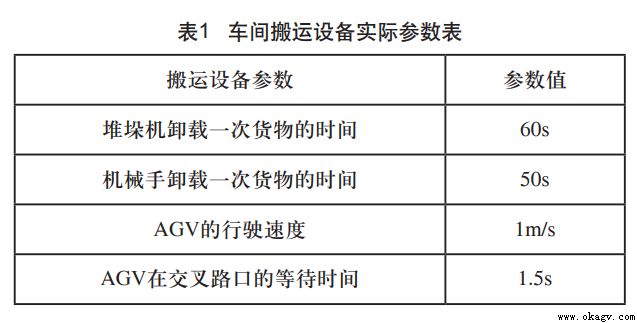
表1車門搬運設備實際參數表
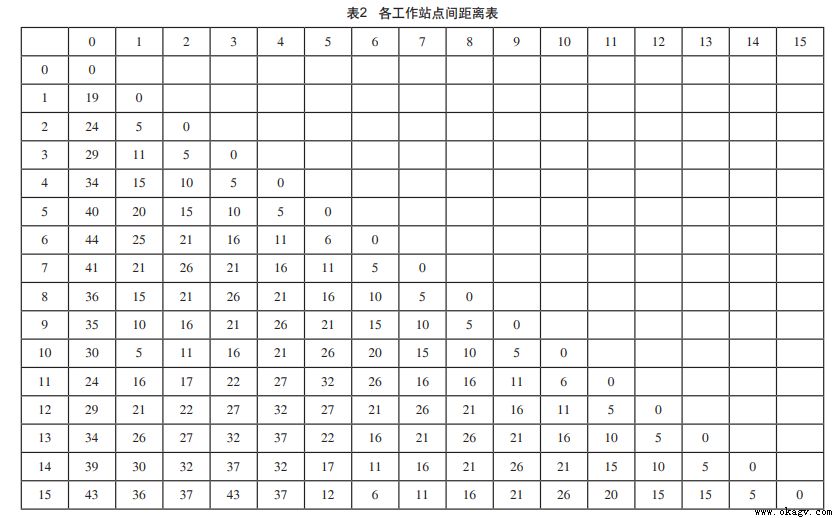
表2 各工作站點間距離表
實驗結果如表3所示,搬運任務數相同時,AGV在交叉路口的耗時與AGV數量成(chéng)正比,總完工時間與AGV數量成(chéng)反比。AGV數量相同時,AGV在交叉路口的耗時和總完工時間均與搬運任務數成(chéng)正比,即固定AGV的使用數量,搬運任務越多,AGV在交叉路口的耗時和總完工時間都(dōu)随之增加。
1)交叉路口考慮避碰
實驗結果如表4所示,考慮AGV在交叉路口的避碰情況,每個算例中AGV在路口的等待耗時均有不同程度的減少,随著(zhe)AGV數量或者搬運任務數量的增加,
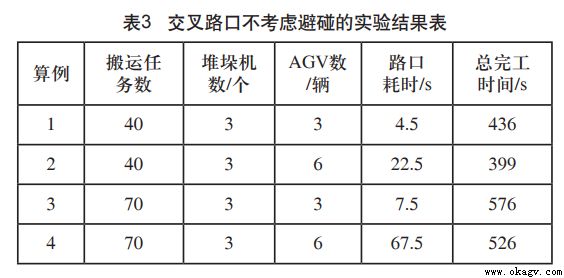
表3 交叉路口不考慮避碰的實驗結果表
AGV在路口的碰撞可能(néng)性增加,使得AGV在路口的等待耗時減少效果較爲明顯。
將(jiāng)在交叉路口不考慮避碰規則和考慮避碰規則兩(liǎng)種(zhǒng)情況進(jìn)行對(duì)比,如圖6和圖7所示,算例1-4在考慮避碰規則下,路口等待時間和總完工時間都(dōu)有一定程度的減少,即在考慮交叉路口避碰的情況下,多設備協同作業的總完工時間、路口等待時間和作業效率都(dōu)有所提高。
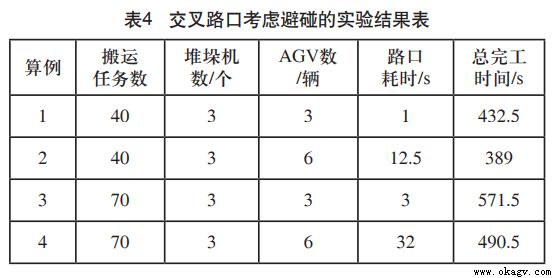
表4 交叉路口考慮避碰的實驗結果表
2)結果對(duì)比
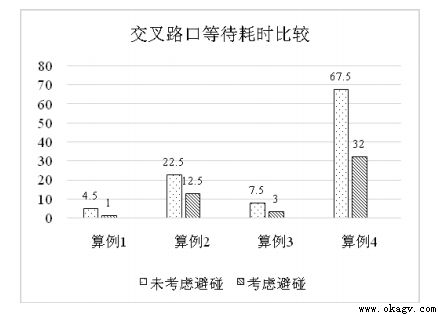
圖6 兩(liǎng)種(zhǒng)情況的交叉路口等待耗時圖

圖7 兩(liǎng)種(zhǒng)情況的總完工時間圖
3)算法性能(néng)比較
通過(guò)算例2將(jiāng)本文的優化自适應PSO與傳統PSO進(jìn)行比較,由圖8和表5可知,在叠代初期,算法趨于快速收斂,在25代左右尋得次優解。在叠代後(hòu)期,基于自适應變異概率,其概率值增大,算法的搜索空間得以增大,在35代左右找到全局最優解。優化自适應PSO在解的變化和種(zhǒng)群均值的變化都(dōu)更爲穩定且收斂速度更快。

表5 算法運算結果比較表
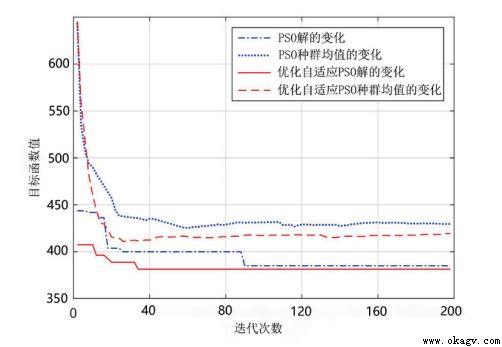
圖8 目标函數變化曲線圖
本文針對(duì)智能(néng)工廠中多搬運載體的協同作業問題,建立以總任務完工時間最少爲主決策目标和以懲罰成(chéng)本最低爲輔助決策目标的協同作業優化模型。考慮AGV在交叉路口的避碰規則,AGV在檢測以互容和不容兩(liǎng)種(zhǒng)相位判斷多輛AGV是否可以同時在交叉路口通行,針對(duì)處于不容相位的AGV,通過(guò)動态調整行車優先級規則,以最大程度上保證任務執行的準時性。協同作業模型采用優化PSO算法求解,爲避免在叠代後(hòu)期陷入局部最優,引入遺傳算法中的自适應變異,增強算法搜索解的維度空間。以電氣配件制造裝配車間爲實例,以控制變量法對(duì)在交叉路口考慮避碰規則和不考慮避碰進(jìn)行對(duì)比,結果表明在路口等待時間和總完工時間上,考慮避碰規則的結果都(dōu)優于不考慮避碰的情況。將(jiāng)優化PSO算法和傳統PSO進(jìn)行同模型同算例對(duì)比,結果表明在最優解、種(zhǒng)群最優解均值和收斂次數上優化自适應PSO算法呈較爲明顯優勢。
[1] 陳敏,黎展滔,陳慶新,等.考慮有限物流運輸能(néng)力的智能(néng)車間AGV調度算法研究[J].工業工程,2019,22(4):49-57.
[2] 賀長(cháng)征,宋豫川,雷琦,等.柔性作業車間多自動導引小車和機器的集成(chéng)調度[J].中國(guó)機械工程,2019,30(4):438-447.
[3] 劉旭,樓佩煌,錢曉明,等.基于改進(jìn)遺傳算法的物料配送多AGV調度優化[J].機械設計與制造工程,2015,44(3):16-21.
[4] 嶽笑含,許曉健,王溪波.面(miàn)向(xiàng)FMS基于改進(jìn)的混合PSO-GA的多AGV調度算法研究[J].計算機科學(xué),2018,45(S2):167-171.
[5] Abdelmaguid T F, Nassef A O, Kamal B A, et al. A hybrid GA/heuristic approach to the simultaneous scheduling of machines and automated guided vehicles[J].International journal of production research,2014,42(2):267-281.
[6] 胡傑傑.面(miàn)向(xiàng)制造車間柔性物流的AGV群控系統研制[D].北京郵電大學(xué),2019.
[7] 肖萌.基于混合遺傳算法的電力設備檢測柔性調度研究[D].武漢理工大學(xué),2018.
[8] 肖海甯,樓佩煌.自動導引車系統避碰及環路死鎖控制方法[J].計算機集成(chéng)制造系統,2015,21(05):1244-1252.
[9] 喬岩,錢曉明,樓佩煌.基于改進(jìn)時間窗的AGVs避碰路徑規劃[J].計算機集成(chéng)制造系統,2012,18(12):2683-2688.
[10] Belhaiza S, Hansen P, Laporte G. A hybrid variable neighborhood tabu search heuristic for the vehicle routing problem with multiple time windows[J].Computers & Operations Research,2014,52:269-281.
[11] Belhaiza S. A game theoretic approach for the real-life multiplecriterion vehicle routing problem with multiple time windows[J]. IEEE Systems Journal, 2016,12(2):1251-1262.
[12] Lau H Y K, Zhao Y. Integrated scheduling of handling equipment at automated container terminals[J].International journal of production economics, 2008,112(2):665-682.
[13] 李珍惜.基于激光導航AGV路徑規劃與避障算法的研究[D].西安科技大學(xué),2019.
[14] Mousavi M, Yap H J, Musa S N, et al. Multi-objective AGV scheduling in an FMS using a hybrid of genetic algorithm and particle swarm optimization[J]. PloS one,2017,12(3):e0169817.
[15] Ma Y, Xu J. A cloud theory-based particle swarm optimization for multiple decision maker vehicle routing problems with fuzzy random time windows[J].Engineering Optimization,2015,47(6): 825-842文章來源于AGV吧
上一條:AGV在BEV汽車後(hòu)橋裝配線中的應用設計 下一條:基于模糊 PID的AGV轉速控制系統設計
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢