專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





核心摘要:AGV如何實現轉向(xiàng)驅動?有哪些轉向(xiàng)驅動類型?實現AGV高效精準的運行,離不開(kāi)導航系統和轉向(xiàng)驅動系統的通力協作。AGV在日常運輸過(guò)程中需要用轉向(xiàng)驅動裝置來控制運動方式。不同...
有哪些轉向(xiàng)驅動類型?
(視頻制作LogTV,轉載務必注明來源!)
實現AGV高效精準的運行,離不開(kāi)導航系統和轉向(xiàng)驅動系統的通力協作。AGV在日常運輸過(guò)程中需要用轉向(xiàng)驅動裝置來控制運動方式。不同的車輪結構和布局有著(zhe)不同的轉向(xiàng)和控制方式,其承重能(néng)力、運行精度、靈活性等也不盡相同,對(duì)運行地面(miàn)環境也有不同的要求。那麼(me),不同的轉向(xiàng)驅動裝置适用于什麼(me)應用場景?又有哪些優缺點呢?下面(miàn)小編就給大家介紹一些常見的轉向(xiàng)驅動類型。
logclub
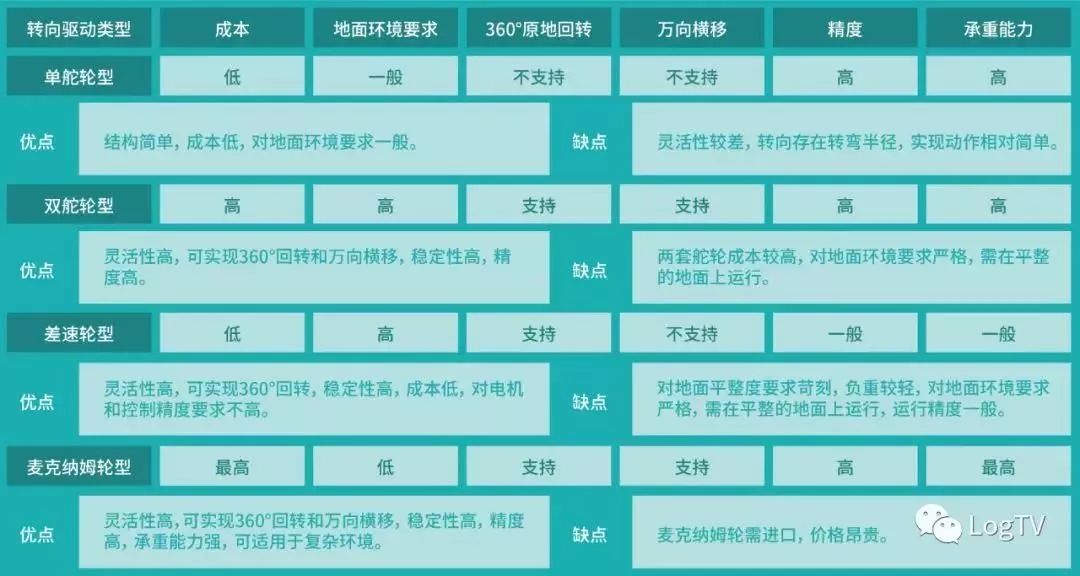
常見的AGV轉向(xiàng)驅動類型
1、單舵輪型
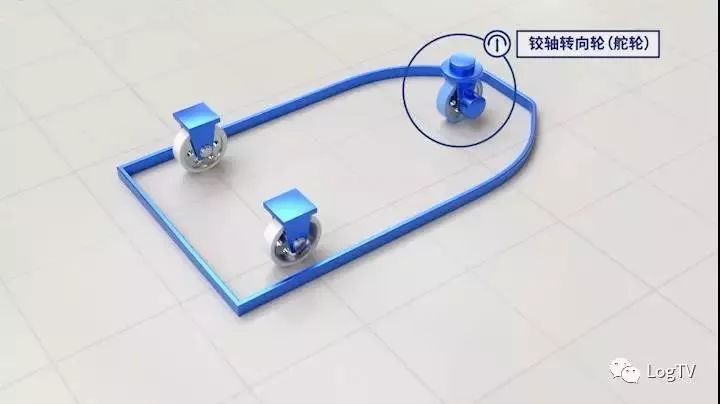
單舵輪型AGV多爲三輪車型(部分AGV爲了更強的穩定性會(huì)安裝多個随動輪,但轉向(xiàng)驅動裝置僅爲一個舵輪),主要是依靠AGV前部的一個鉸軸轉向(xiàng)車輪作爲驅動輪,搭配後(hòu)兩(liǎng)個随動輪,由前輪控制轉向(xiàng)。單舵輪轉向(xiàng)驅動的優點是結構簡單、成(chéng)本低,由于是單輪驅動,無需考慮電機配合問題,因三輪結構的抓地性好(hǎo),對(duì)地表面(miàn)要求一般,适用于廣泛的環境和場合。缺點是靈活性較差,轉向(xiàng)存在轉彎半徑,能(néng)實現的動作相對(duì)簡單。
适用AGV類型:牽引式AGV、叉車式AGV。
适用場景:大噸位貨物搬運,适用場景廣泛。
2、雙舵輪型
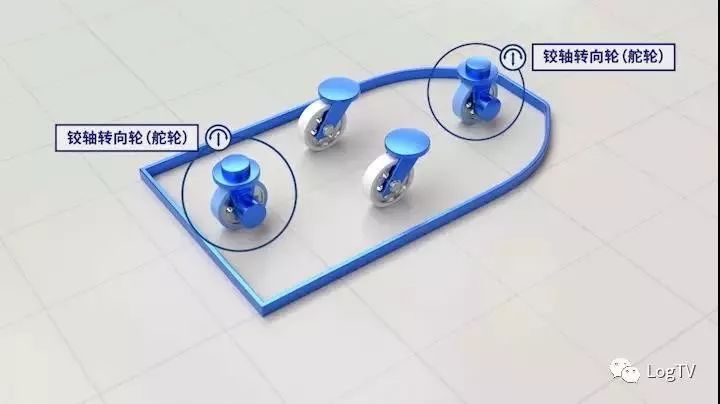
雙舵輪型AGV爲萬向(xiàng)型AGV,車體前後(hòu)各安裝一個舵輪,搭配左右兩(liǎng)側的随動輪,由前後(hòu)舵輪控制轉向(xiàng)。雙舵輪型轉向(xiàng)驅動的優點是可以實現360°回轉功能(néng),也可以實現萬向(xiàng)橫移,靈活性高且具有精确的運行精度。缺點是兩(liǎng)套舵輪成(chéng)本較高,而且AGV運行中經(jīng)常需要兩(liǎng)個舵輪差動,這(zhè)對(duì)電機和控制精度要求較高,而且因爲四輪或以上的車輪結構,容易導緻一輪懸空而影響運行,所以對(duì)地面(miàn)平整度要求嚴格。但是由于底部輪子更多,受力更均衡,所以這(zhè)種(zhǒng)驅動方式的穩定性比單舵輪型AGV更高。
适用AGV類型:重載潛伏式AGV或停車機器人。
适用場景:大噸位的物料搬運,适用于汽車制造工廠、停車場等場景。
3、差速輪型
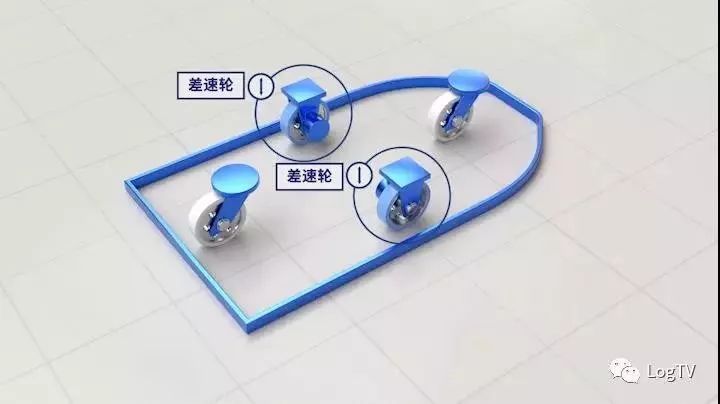
差速輪型AGV的結構是車體左右兩(liǎng)側安裝差速輪作爲驅動輪,其他爲随動輪,與雙舵輪型不同的是,差速輪不配置轉向(xiàng)電機,也就是說驅動輪本身并不能(néng)旋轉,而是完全靠内外驅動輪之間的速度差來實現轉向(xiàng)。這(zhè)種(zhǒng)驅動方式的優點是靈活性高,同樣(yàng)可實現360°回轉,但由于差速輪本身不具備轉向(xiàng)性,所以這(zhè)種(zhǒng)驅動類型的AGV無法做到萬向(xiàng)橫移。此外,差速輪對(duì)電機和控制精度要求不高,因而成(chéng)本相對(duì)低廉,而缺點是差速輪對(duì)地面(miàn)平整度要求苛刻,負重較輕,一般負載在1噸以下,無法适應精度要求過(guò)高的場合。大家熟悉的亞馬遜KIVA機器人就是使用差速輪轉向(xiàng)驅動方式。
适用AGV類型:潛伏式AGV。
适用場景:适用于環境較好(hǎo)的電商、零售等倉庫場景。
4、麥克納姆輪型
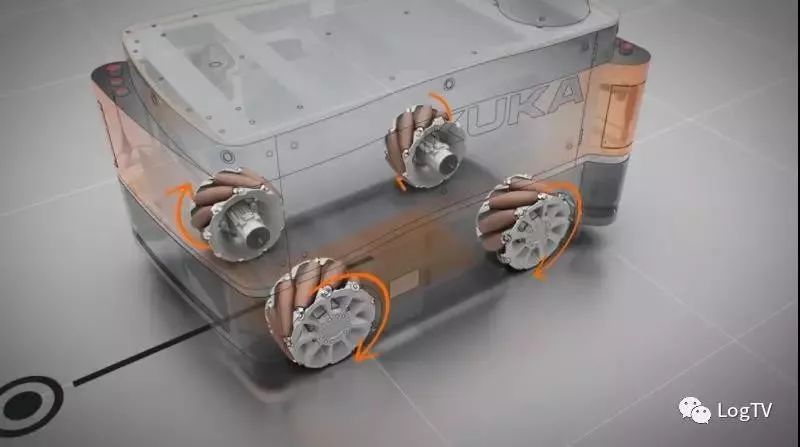
麥克納姆輪設計新穎,這(zhè)種(zhǒng)全方位移動方式是基于一個有許多位于機輪周邊的輪軸的中心輪的原理上,這(zhè)些成(chéng)角度的周邊輪軸把一部分的機輪轉向(xiàng)力轉化到一個機輪法向(xiàng)力上面(miàn)。依靠各自機輪的方向(xiàng)和速度,這(zhè)些力的最終合成(chéng)在任何要求的方向(xiàng)上産生一個合力矢量從而保證了這(zhè)個平台在最終的合力矢量的方向(xiàng)上能(néng)自由地移動,而不改變機輪自身的方向(xiàng)。簡單來說,就是在輪毂上安裝斜向(xiàng)輥子,通過(guò)協同運動以實現移動或旋轉。麥克納姆輪的優點是具有10噸以上的載重能(néng)力,靈活性高,可以實現360°回轉功能(néng)和萬向(xiàng)橫移,更适合在複雜地形上的運動。缺點是麥克納姆輪屬于瑞典麥克納姆公司的專利,隻能(néng)從國(guó)外進(jìn)口,再加上本身運動類型的複雜性,因此價格昂貴。
适用AGV類型:重載型移動平台、戶外移動機器人
适用場景:飛機、高鐵等生産制造場景、戶外機器人運輸場景。
不同的轉向(xiàng)驅動類型對(duì)應著(zhe)不同場景下的應用需求,需要根據環境、負載等因素進(jìn)行綜合評估選定。根據應用場景的環境需要,選用最合适的轉向(xiàng)驅動方式,隻有這(zhè)樣(yàng)才能(néng)保證不同作業場景下AGV運行的可靠性、穩定性和精确性。
上一條:AGV小車激光導航工作原理優缺點 下一條:AGV小車的日常保養流程和注意事(shì)項
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢