專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





如今很多的倉儲物流公司都(dōu)已經(jīng)開(kāi)始在使用AGV小車,那麼(me)AGV小車的導航方式原理是什麼(me)呢?其有什麼(me)優點呢,下面(miàn)就由小編給大家普及一下這(zhè)方面(miàn)的知識吧。
AGV小車激光導航工作原理優缺點
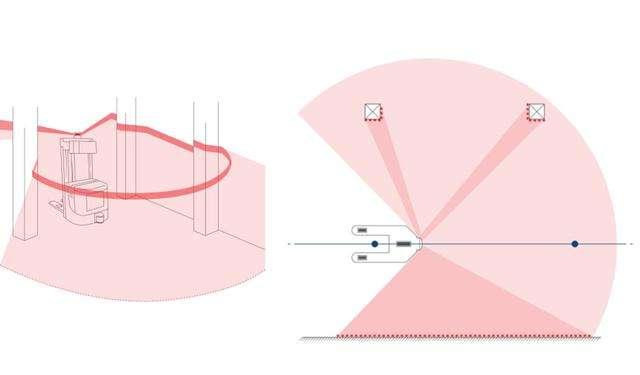
激光導航:AGV小車在行駛路徑上安裝精确反射闆,AGV通過(guò)發(fā)射激光束,同時采集由反射闆反射的激光束,從而确定其當前的位置以及方向(xiàng)。AGV小車初始位置計算:AGV小車停止不動,激光掃描儀至少可測4條光束,至少看到4塊反射闆,在已知反射闆的精确位置(X,Y),AGV會(huì)連續的計算小車當前的位置,根據估算的新位置關聯反射闆,去修正自身位置,以此來修正下一步動作。
激光導航優點在于AGV小車定位精确,而且地面(miàn)無需其他定位設施,行駛路徑可以靈活改變。
激光導航缺點是由于激光導航控制複雜以及激光技術昂貴的投資成(chéng)本,反射片以及AGV激光傳感器直接不能(néng)有障礙物,不适合空中有物流影響的場合。
以上就是AGV小車的激光導航原理,希望能(néng)夠幫到大家,後(hòu)面(miàn)會(huì)陸續有更多的資訊,請關注我們哦!
上一條:AGV的主要技術參數 下一條:盤點AGV的轉向(xiàng)驅動類型
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢