專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





AGV(Automated Guided Vehicle)小車作爲目前工業自動化系統中重要的組成(chéng)部分,在工廠和廠房的物流調度系統中起(qǐ)著(zhe)重要作用[1],有著(zhe)非常廣泛的應用前景。
傳統的AGV小車控制以經(jīng)典的PID控制爲主,但PID控制的精确程度取決于系統數學(xué)模型的精确程度及參數設置狀況[2]。AGV小車在工廠及廠房中的工作環境複雜,且在行駛過(guò)程中會(huì)受到各種(zhǒng)工況的幹擾,傳統的 PID 控制有時很難達到難以效果[3]。
基于此,分析了模糊控制機理,針對(duì) AGV 中直流電機的調速系統,采用模糊 PID 進(jìn)行控制,極大地提高了智能(néng)小車轉速控制的準确性、穩定性及反應速度。
AGV 系統裝備了磁導航、CCD 導航、激光導航等[4],使得 AGV 在行駛過(guò)程中能(néng)夠按照事(shì)先規劃的路徑運行,操作者隻需根據上位機進(jìn)行現場的實時調度,對(duì)于不同的現場運行情況 AGV 進(jìn)行實時的現場調度,因此,大大降低了對(duì)于人力的依賴,提高了工作效率和安全系數。
AGV系統通過(guò)貼在地面(miàn)上的磁導航傳感器進(jìn)行導航,實時監控AGV小車現場位置,現場調度,避免AGV之間發(fā)生碰撞。AGV的供電系統由電池提供,兩(liǎng)塊電池安裝在AGV的兩(liǎng)端(一般爲對(duì)稱安裝),磁感應傳感器安裝在 AGV 的兩(liǎng)端,産生一個閉環的系統來進(jìn)行小車的實際位置的現場調節[5]。AGV大小有很多種(zhǒng)分類,對(duì)于大型 AGV的調度需要考慮其安全範圍是否足夠,轉彎時是否滿足現場要求。AGV系統零件圖如圖 1 所示,其中①啓動、停止、複位、急停按鈕;②和③均爲 12 V 電池;④輪子;⑤三色燈;⑥傳送帶;⑦觸摸屏;⑧避障傳感器;⑨對(duì)射傳感器。AGV伺服安裝如圖2所示,其中,①爲前磁導航傳感器;②爲後(hòu)磁導航傳感器;③爲伺服電機;④爲伺服驅動器。
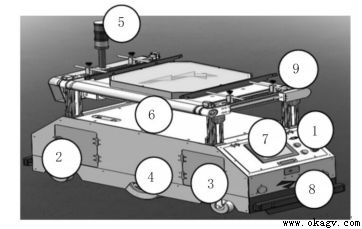
圖1 AGV系統零件圖
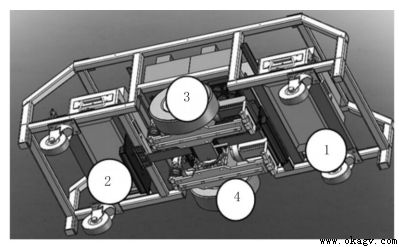
圖2 AGV伺服安裝圖
基于模糊PID的AGV轉速控制如圖 3 所示[6]。
驅動控制器控制紅外傳感器工作,根據收集到的路況循迹信息得到小車的速度給定值,同時,車輪速度檢測模塊檢測小車速度,進(jìn)行隔離、放大、A/D 轉換後(hòu)與給定速度進(jìn)行比較,若工廠的物流調度路徑有上行、下行或轉彎狀況,速度檢測模塊即會(huì)表現出上升或下降現象,將(jiāng)此偏差信号送給模糊 PID 控制器,控制器進(jìn)行模糊規則的選擇,輸出精确的速度脈沖信号送入電力電子執行機構,驅動直流電機精确的按照實際路況循迹速度運行。
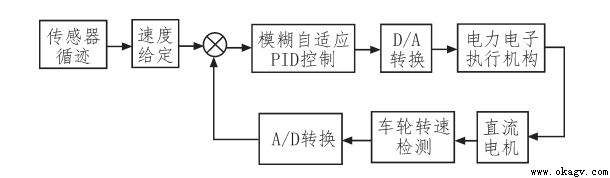
圖3 AGV轉速控制框圖
模糊 PID 控制器結構如圖 4所示,主要分爲兩(liǎng)個模塊,其一是傳統的 PID 控制器,其二是模糊控制器,模糊控制器來實現 PID 控制器參數的現場确定,使得 PID控制效果更加理想化,模糊PID控制器主要是實現PID三大參數和誤差e的變化率△e之間的關系,在運行過(guò)程中根據誤差和誤差的變化率不斷判斷、計算最終的比例、積分、微分參數[7]。
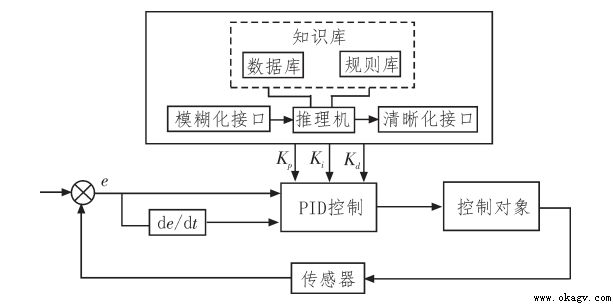
圖4 模糊PID控制結構圖
基于上述結構,AGV轉速控制模糊PID設計可分爲以下 4個步驟[8-9]。
第一步,系統輸入輸出信号的确定。AGV小車數據采樣(yàng)是通過(guò)磁導航傳感器的16位數字采樣(yàng)點,以I/O輸入的模式進(jìn)行,通過(guò)分析輸入信号的不同來确定AGV小車實際所處的位置[10],磁導航爲 16路 16點數字量輸出,一般正常檢查到的信号爲 5路 5點數字量輸出,理論分爲下面(miàn) 20種(zhǒng)情況:
1000000000000000(1)
1100000000000000(2)
1110000000000000(3)
1111000000000000(4)
1111100000000000(5)
0111110000000000(6)
0011111000000000(7)
0001111100000000(8)
0000111110000000(9)
0000011111000000(10)
0000001111100000(11)
0000000111110000(12)
0000000011111000(13)
0000000001111100(14)
0000000000111110(15)
0000000000011111(16)
0000000000001111(17)
0000000000000111(18)
0000000000000011(19)
0000000000000001(20)
取直流電機角速度誤差 e 和誤差變化率 ec 爲系統輸入變量,ΔKp、ΔKi、ΔKd爲輸出變量。將(jiāng)誤差 e 與誤差變化率 ec的模糊基本論域取爲[-6,6]。
通過(guò)比例、量化因子映射到論域:設磁導航傳感器的 16路輸出依次從左到右爲(1)→-6,(2)→-5,(3)(4)→-4,(5)(6)→-3,(7)→-2,(8)(9)→-1,(10)(11)→0,(12)(13)→1,(14)→2,(15)(16)→3,(17)(18)→4,(19)(20)→5
第二步,系統輸入輸出變量模糊化。
設計中將(jiāng)e、ec、ΔKp、ΔKi、ΔKd的量化等級均設爲13級,即2個輸入變量一個輸出變量在模糊集上的論域爲:{-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6}。對(duì)應的模糊語言爲{NB,NM,NS,ZO,PS,PM,PB},該集合中元素分别代表負大、負中、負小、零、正小、正中、正大[11-12]。把上述集合的元素描述爲AGV 小車的加、減速狀況,則爲:NB 表示大減速、NM表示中減速、NS表示小減速、ZO 表示保持當前轉速、PS 表示小加速、PM 表示中加速、PB 表示大加速。考慮到 AGV 小車在實際運行中産生的誤差是随機的,因此,采用三角形隸屬函數,如圖 5所示。
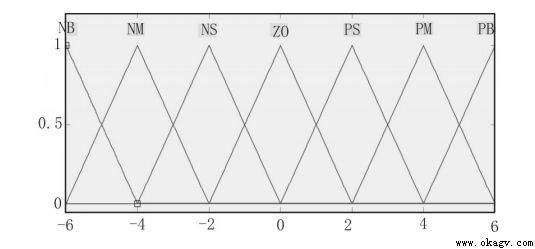
圖5 三角形隸屬函數圖
第三步 模糊規則庫的建立。
模糊規則庫的建立即爲找出運行時刻P、I、D與誤差e及誤差變化率ec之間的模糊關系。通過(guò)e和ec的變化規律,應用所制定的模糊控制規則,從而調整ΔKp、ΔKi、ΔKd三個參數值,使AGV小車在運行過(guò)程中有良好(hǎo)的動态性及穩定性[13-14]。應用在智能(néng)小車中,對(duì)速度誤差e的控制規律尤爲重要,不合适的控制規律會(huì)使AGV的速度産生振蕩,對(duì)不同車間的不同路徑沒(méi)有很好(hǎo)的适應性。當車體實際運行速度和期望速度偏差e大時,爲了加速系統的跟蹤速度,應取較大的Kp;但是爲了避免由于開(kāi)始時偏差e的瞬間變大可能(néng)出現的微分過(guò)飽和而使控制作用超出許可範圍,應取較小的Kd,同時爲了防止系統速度響應出現較大的超調,産生積分飽和,應對(duì)積分作用加以限制,通常取Ki=0等。根據AGV的操作經(jīng)驗,可得轉速控制輸出參數(ΔKp、ΔKi、ΔKd)的模糊規則庫如表 1所示[15-17]。
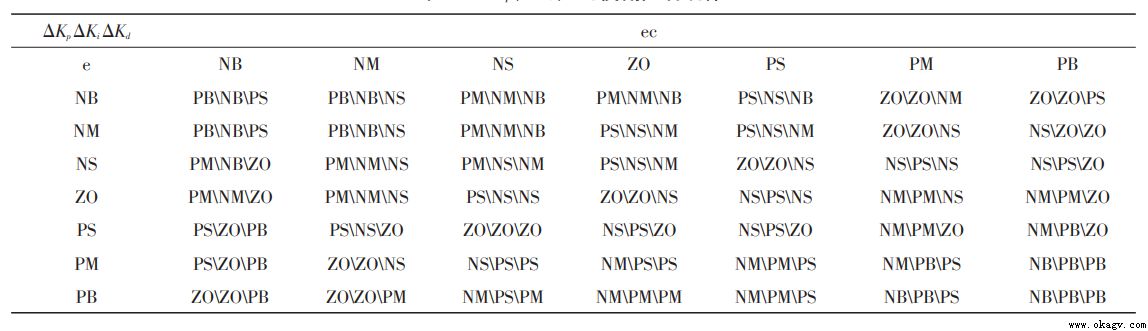
表1 ΔKp、ΔKi、ΔKd模糊控制規律
模糊控制器輸出量是模糊量,不能(néng)直接用來控制直流電機的轉速,在AGV實際控制時要將(jiāng)這(zhè)些結果轉化爲精确量。考慮到重心法能(néng)較好(hǎo)的反映控制量的真實分布情況,因此,在本設計中采用重心法對(duì)模糊變量進(jìn)行轉化。
文中采用AB PLC作爲控制設備,用梯形圖對(duì)PID控制器和模糊控制器進(jìn)行設計,爲了可以快速響應AGV小車的實際位置,采樣(yàng)時間設爲100mms。電路和氣路連接完成(chéng)并檢查無誤後(hòu),通電下載程序并在線監控程序運行。連接路由器,進(jìn)行 AB PLC 的 IP設置。具體的調試過(guò)程如下:
1)在主菜單畫面(miàn)中 LCD 的使用鍵盤上的 Up 和Down鍵選 Advanced Set。
2)通過(guò)點擊 LCD 鍵盤上的 OK 鍵即可出現高級設置操作界面(miàn),如圖 6 所示。該界面(miàn)上有“Up”和“Down”上、下翻轉鍵用來選擇 ENET 功能(néng),選擇好(hǎo)之後(hòu)點擊 OK 鍵即可進(jìn)入。
3)使用“Up”和“Down”上、下翻轉鍵對(duì) IP 地址進(jìn)行設置,設置好(hǎo)的 IP地址點擊 OK 鍵即可。
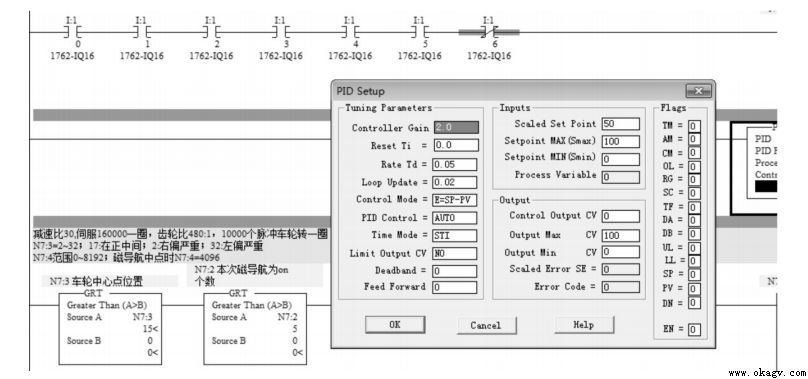
圖6 PID參數程序調試界面(miàn)圖
4)輸入密碼操作界面(miàn),在本 AGV 小車控制系統中 ,通 過(guò) Left、Right、Up 和 Down 鍵實現Master password的設置,該密碼最大長(cháng)度爲10位數字,在本操作系統中,設置 1234爲 Master password。
5)密碼驗證界面(miàn),若輸入的密碼正确,則顯示以太網網絡類型選擇界面(miàn),點擊“Up”和“Down”上、下翻轉鍵選擇合适的網絡類型;若輸入密碼不正确,則操作界面(miàn)會(huì)提示密碼有誤的錯誤信息。
6)對(duì)網絡的IP地址以及子網掩碼等信息進(jìn)行設置。調試過(guò)程完成(chéng)後(hòu),圖 7 和圖 8 分别顯示了傳統PID 和本設計的模糊 PID 實現結果。可以看出,模糊PID 控制有較短的響應時間,較小的超調,能(néng)較快進(jìn)入穩态,因此,能(néng)更好(hǎo)的跟蹤 AGV 小車速速控制。
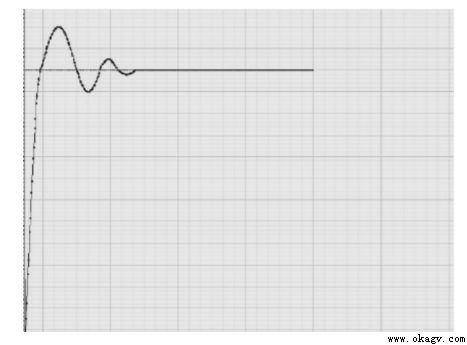
圖7 PID響應圖
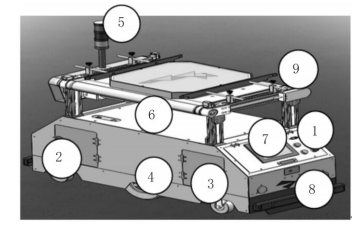
圖8 模糊PID響應圖
文中介紹了AGV小車的構成(chéng),在此基礎上,針對(duì)小車的轉速控制系統,設計了轉速模糊PID控制器,并在PLC設備上進(jìn)行了實際驗證,與傳統PID控制相比,AGV模糊 PID 轉速控制器響應時間短,響應過(guò)程無振蕩無超調,有較好(hǎo)的動、穩态性能(néng)。
[1] 曾炫. 基于模糊控制的磁引導AGV系統路徑校正的應用研究[D]. 杭州:杭州電子科技大學(xué),2015.
[2] Mendes J,Araujo R,Matias T,et al. Automatic extraction of the fuzzy control system by a hierar⁃ chical genetic algorithm[J]. Engineering Applica⁃ tions of Artificial Intelligence,2014,29(3):70-78.
[3] Baturone I,Moreno-Velo FJ,Śnchez-Solano S,et al. Automatic design of fuzzy controllers for carlike autonomous robots[J]. IEEE Transactions on Fuzzy Systems,2004,12(4):447-465.
[4] 宋學(xué)賢,談宏華,潘正春,等. 基于自适應模糊PID的AGV高精度尋迹系統的研究[J]. 國(guó)内外機電一體化技術,2012(1):29-31.
[5] 武星,樓佩煌,唐敦兵. 自動導引車路徑跟蹤和伺服控制的混合運動控制[J]. 機械工程學(xué)報,2011,47(3):43-48.
[6] 葉金鑫. 基于模糊 PID 的智能(néng)小車控制算法研究[J]. 實驗科學(xué)與技術,2016,14(1):46-47.
[7] 王述彥,師宇,馮忠緒. 基于模糊 PID 控制器的控制方法研究[J]. 機械科學(xué)與技術,2011,30(1):166-172.
[8] 黃友銳,曲立國(guó).PID 控制器參數整定與實現[M].
[9] 湯紅誠,李著信,王正濤,等. 一種(zhǒng)模糊PID控制系統[J]. 電機與控制學(xué)報,2005,9(2):136-138.
[10]紀亞芳,張志剛. 基于模糊 PID 的雙容水箱液位控制系統設計[J]. 山西師範大學(xué)學(xué)報(自然科學(xué)版),2019,33(2):37-40.
[11]李言民,苗欣,姜付傑,等. 基于模糊PID 控制器的多電機交叉耦合控制同步控制系統設計[J]. 電工技術,2005(3):118-120.
[12]王建紅,陳耀忠,陳桂,等. 基于交叉耦合控 制的雙電機同步控制系統研究[J]. 南京理工大學(xué)學(xué)報,2017,41(6):693-697.
[13]張小娟. 基于AT89S51單片機的除氧器溫度控制系統的設計[J]. 紡織高校基礎科學(xué)學(xué)報,2010(3): 372-376.
[14]鞠升輝,李楊民. 非完整約束移動機器人論域自調整模糊控制研究[J]. 電子設計工程,2016,24(5):103-106.
[15]徐鄭林,朱建波,鄭偉傑,等. 基于模糊控制的電動汽車充電器的研究[J]. 電子設計工程,2017,25(12):85-88.
[16]王璐.一種(zhǒng)基于模糊控制的多傳感器管理算法的研究[J].電子設計工程,2018,26(21):47-51.
[17]蘇揚,劉文言,劉潇,等. 基于模糊控制的盲人避障系統設計[J]. 信息網絡安全,2014(6):67-71.文章來源于AGV吧
上一條:智能(néng)工廠多搬運載體(堆垛機、AGV、機械手)協同作業優化 下一條:AGV智能(néng)倉儲機器人結構優化設計
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢