專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





輪廓導航
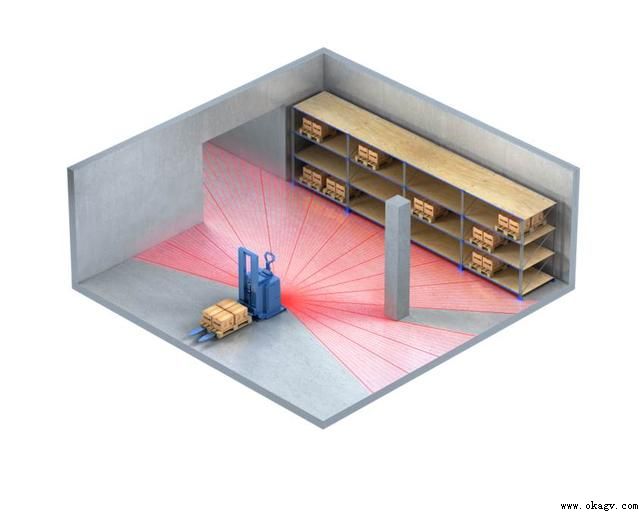
輪廓導航是目前AGV最爲先進(jìn)的導航技術,該技術利用二維激光掃描儀對(duì)現場環境進(jìn)行測量、學(xué)習,并繪制導航環境,然後(hòu)進(jìn)行多少測量學(xué)習,修正地圖進(jìn)而實現輪廓導航功能(néng)。
輪廓導航
利用自然環境(牆壁、柱子以及其它固定物體)進(jìn)行自由測距導航根據環境測量結果更新位置。
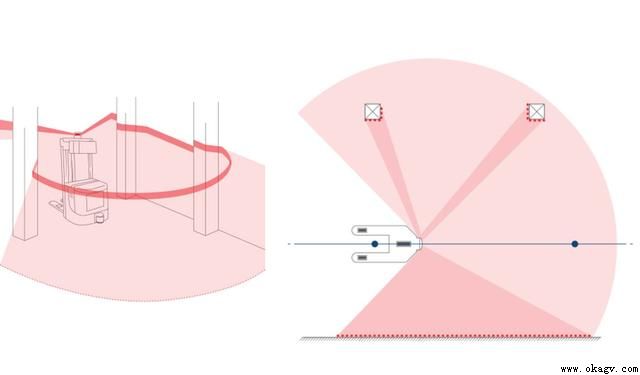
輪廓導航原理
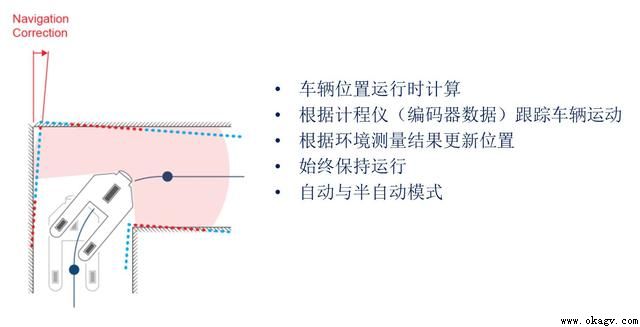
輪廓導航轉彎實現原理
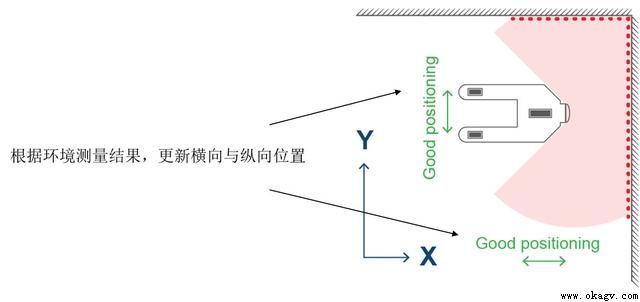
輪廓導航環境測量實現
目前輪廓導航傳感器類型:
1、采用具有測量功能(néng)的安全激光掃描儀。
2、采用具有測量功能(néng)的激光掃描儀
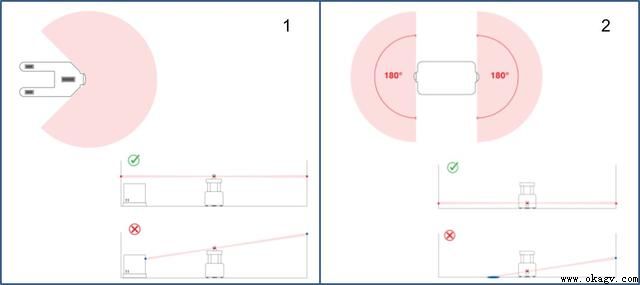
輪廓導航傳感器安裝分類:
獲得足夠大的視野是輪廓導航的必要條件:
將(jiāng)單個傳感器安裝在高處,以獲得270度視角。
安裝兩(liǎng)個傳感器,以獲得超過(guò)270度的視角。确保水平對(duì)齊。
輪廓導航安裝方式
貨物應設置在适當範圍内(比如最大距離 30 米,在可行性評估時,采用使用 20 米) 以及在兩(liǎng)邊與前面(miàn),以實現完整的位置更新 ,這(zhè)點很重要。
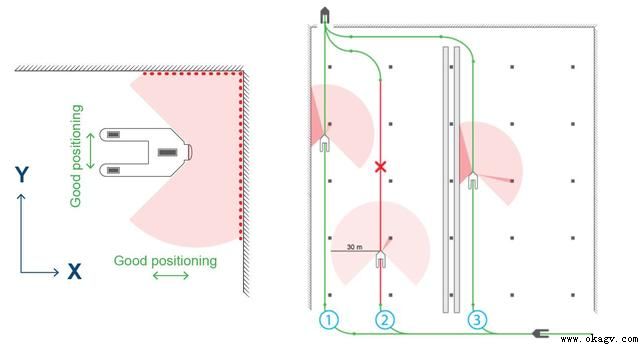
輪廓導航AGV路徑設置
環境動态變化
預知傳感器視角會(huì)因員工、車輛、門與設備移動而臨時移動,這(zhè)在一定程度上是可以接受的。設備、車輛、托盤與其它固體要在車輛行駛時保持靜止,這(zhè)面(miàn)臨的挑戰更大。
至少 50% 的傳感器讀數來自實測圖中的物體。

輪廓導航環境動态評估
輪廓導航優點:
1、不需要反射器或其它人工地标
2、降低安裝成(chéng)本
3、減少維護工作
4、激光導航替代方案
上一條:混合導航與光學(xué)導航技術 下一條:電磁導航agv的優缺點
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢