專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





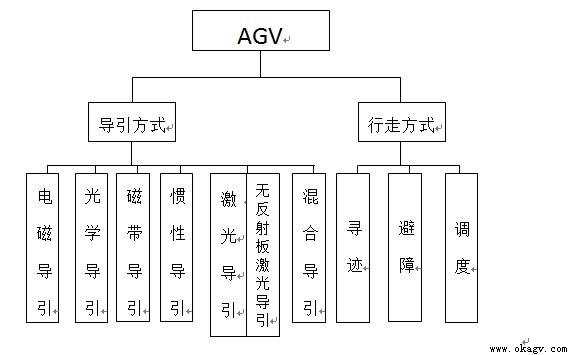
AGV技術分支框架圖
AGV 主要由導向(xiàng)模塊、行走模塊、控制模塊、通訊裝置、移載裝置和蓄電池等構成(chéng),其中,導向(xiàng)模塊和控制模塊是AGV的關鍵模塊。AGV技術最早出現在美國(guó),著名的福特汽車公司是AGV應用的先驅,在1913年時就采用有軌引導的AGV代替輸送機在汽車底盤裝配線上應用。那時候的AGV并不屬于自動導引小車,而是需要借助軌道(dào),在特定的路徑上作業,與現在應用的自主導引AGV存在很大的差異。1953年美國(guó)公司設計了第一台電磁導引的AGV,雖然這(zhè)時候AGV的專利還(hái)很少,但從此開(kāi)啓了AGV導航技術的研究熱點。
20世紀80年代以來開(kāi)啓了AGV技術研究的一個小高峰,主要是因爲無線導引技術被(bèi)引入到AGV系統中,其中影響最大最典型的是激光導引。激光導引的引入,使AGV在靈活性和精準度上取得巨大的進(jìn)步。之後(hòu)21世紀初AGV的技術研究進(jìn)入瓶頸期,這(zhè)時期的AGV專利申請量呈下滑趨勢,急需攻克的技術難題是靈活性和大型調度系統的集成(chéng)實用。2010年後(hòu)AGV迎來了另一個發(fā)展高峰,這(zhè)得益于大型服務器、數據處理器的開(kāi)發(fā)和新型導引方式的應用,如無反射闆激光自主導航技術,使得AGV更加智能(néng)且模塊化。
AGV機器人的專利申請量主要集中在日本、美國(guó)、歐洲、韓國(guó)、中國(guó)等國(guó)家,日本通過(guò)對(duì)複雜AGV簡化研究,轉化爲AGC,在專利申請量上超越AGV發(fā)源國(guó)美國(guó),排名第一。中國(guó)引入AGV的時間比較晚,但有後(hòu)來居上的趨勢,AGV申請量排名僅次于日本,占據第二位。國(guó)内的專利申請人主要集中在高校和中小企業,其中高校申請人如蘇州工業園區職業技術學(xué)院、南京航空航天大學(xué)、合肥工業大學(xué)等。中小企業申請人中,艾吉威機器人有限公司所占比重較大,2014年後(hòu)最新申請量排名全國(guó)第一,且申請質量較高,發(fā)明專利較多,包括無反射闆激光自主導航技術的發(fā)明專利。
AGV技術分支框架圖
通過(guò)對(duì)AGV 相關專利文獻的标引,發(fā)現專利申請側重領域很多,其核心包括改善導航方式研究(根據具體的應用環境選取特定的導引方式,或者采用多種(zhǒng)導引方式結合的方式取長(cháng)補短以達到較好(hǎo)的綜合效果),AGV 自身定位精度、控制系統和路徑規劃方法,如通過(guò)改進(jìn)導引設備自身以提高定位精度、集成(chéng)控制系統的設計、路徑規劃方法的選擇爲實現AGV的精确定位。
綜上所述,AGV 随著(zhe)計算機技術和智能(néng)控制策略的發(fā)展,開(kāi)始走向(xiàng)集成(chéng)化和智能(néng)化,主要關注點爲AGV 自身定位的精準性和行走方式的控制,且涉及核心技術的申請量主要集中在歐美日韓等國(guó)家,我國(guó)在AGV 方面(miàn)起(qǐ)步較晚,未來應集中精力改進(jìn)導航方式、控制方式以及AGV結構上,在AGV知識産權上争取更多的話語權。
上一條:AGV導航技術分析 下一條:AGV的導航導引方式介紹
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢