專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





AGV的導航計算介紹
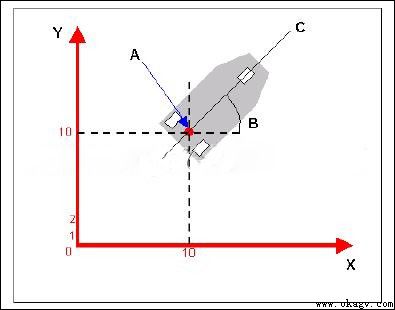
簡單地說,AGV導航就是讓AGV确實知道(dào)自己在哪裡(lǐ),即确定AGV自身在全局坐标系中的位置(x,y)和航向(xiàng)。如圖所示,AGV以點A表示AGV在整個平面(miàn)坐标系中的位置,即參考點,該位置除了x,y信息外還(hái)包含AGV行進(jìn)方向(xiàng)與x軸的夾角信息(航向(xiàng))。
AGV 導航的準确信息來自地面(miàn)固定的靶标(定位塊或激光反射闆等),稱之爲AGV的“實際位置”,但通常限于場地條件及定位傳感器條件的限制,實際位置信息的實 時性不能(néng)滿足AGV運動控制的需要,爲此在實際位置采樣(yàng)的周期内還(hái)須進(jìn)行位置估算(Dead Reckoning)。
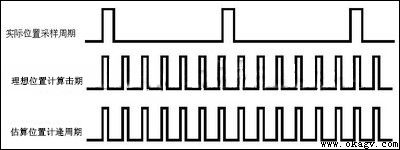
AGV的實際位置是指根據地面(miàn)固定靶标計算而得到的實際位置信息,其精度取決于靶标的測量精度。
AGV的理想位置是指在理想狀态下的位置,由AGV的路徑軌迹方程所确定。
AGV的估算位置是指在實際位置的采樣(yàng)周期内,通過(guò)AGV當前速度和轉向(xiàng)角信息對(duì)位置進(jìn)行估算所得到的位置。
估算位置是真正用于AGV導引控制的,而實際位置隻是定期對(duì)估算位置進(jìn)行修正,導航所需解決的問題就是根據AGV的運動模型,估算出AGV的當前位置,即估算位置。
上一條:AGV的導引計算方法 下一條:AGV的驅動形式
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢