專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





目前4種(zhǒng)主流AGV導航方式(磁條導航、二維碼導航、激光導航、SLAM視覺導航)在市場上已經(jīng)應用的很多了,都(dōu)有著(zhe)定位精确的優點,但是在成(chéng)本方面(miàn),磁導航和二維碼導航成(chéng)本相對(duì)低些,而其他兩(liǎng)種(zhǒng)方式成(chéng)本相對(duì)高,而激光導航的激光傳感器價格也比較高。
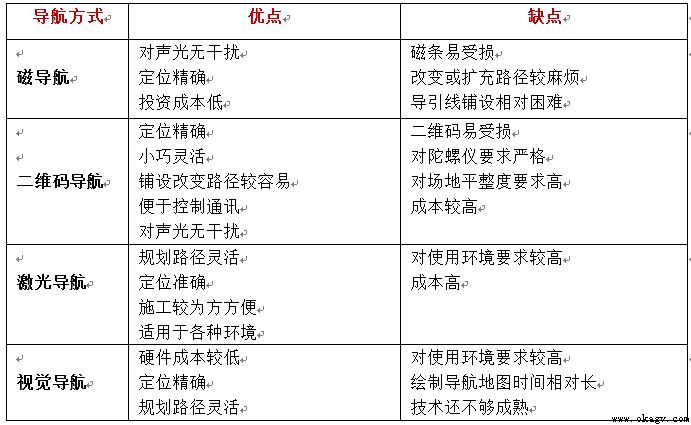
而在路徑規劃靈活度方面(miàn),磁導航的靈活度是最低的,因爲磁導航要改變路徑意味著(zhe)地上的磁導線或磁條要改變,比較麻煩,二維碼導航相對(duì)靈活些,改變路徑較容易,而激光SLAM導航和視覺SLAM導航則是最靈活的,屬于無軌導航。
以上幾種(zhǒng)AGV導航發(fā)展有先有後(hòu),都(dōu)有各自的缺點和優勢,所以從實際的使用場景出發(fā),他們各有市場。但是,未來誰會(huì)是主流的AGV導航方式呢?
磁導航于日本九十年代就大規模興起(qǐ)了,加上磁導航技術門檻低,代碼又開(kāi)源,所以在國(guó)内發(fā)展的時間最久。不過(guò),磁導航AGV成(chéng)本低,性能(néng)一般,是相對(duì)低端的AGV,要求較高的應用場景,都(dōu)不會(huì)用它。
未來,随著(zhe)市場要求的進(jìn)一步提高,留給磁導航AGV的空間隻會(huì)越來越小。
目前,AGV導航技術研發(fā)主要集中在二維碼導航、激光SLAM導航和視覺SLAM導航上,未來發(fā)展也將(jiāng)以這(zhè)三種(zhǒng)導航方式爲主。
二維碼導航在市場上的火爆離不開(kāi)二維碼導航機器人Kiva,它于2012年被(bèi)亞馬遜以7.75億美元的高價收購,瞬間被(bèi)世界所熟知。Kiva被(bèi)譽稱爲世界上最成(chéng)功的AGV設計,定制的雙攝像機成(chéng)像模塊是Kiva系統的關鍵設備之一,一個攝像頭向(xiàng)下看地面(miàn)以識别倉庫地闆上的二維碼,另一個向(xiàng)上看貨架的底部。每個攝像頭都(dōu)配備6個紅色LED用于照明。夾在兩(liǎng)個攝像機之間的是圖像處理模塊,能(néng)通過(guò)高速串口獲取數據,進(jìn)行數據矩陣檢測。
Kiva這(zhè)種(zhǒng)類似棋盤的工作模式令人非常印象深刻,于是,國(guó)内的電商,智能(néng)倉庫也紛紛效仿,采用二維碼導航AGV,進(jìn)而促進(jìn)了二維碼導航AGV的發(fā)展。
不過(guò),二維碼導航要求項目現場鋪設大量二維碼,而二維碼易磨損,維護成(chéng)本較高,所以,二維碼想要長(cháng)盛不衰持續占據大部分市場是比較難的,尤其是在激光傳感技術和視覺傳感技術日漸發(fā)展成(chéng)熟的情況下。
現在激光SLAM導航和視覺SLAM導航的性能(néng)越來越好(hǎo)了,很多人開(kāi)始重視及看好(hǎo)SLAM導航,目前一些傳統導航AGV也已被(bèi)SLAM所取代。
SLAM導航的方式能(néng)使AGV靈活規劃路徑,定位準确,行駛路徑靈活多變,施工較爲方方便,能(néng)夠适應各種(zhǒng)實用環境。
但激光導航成(chéng)本較高,視覺導航繪制地圖時間較長(cháng),所以在目前AGV市場上,這(zhè)兩(liǎng)種(zhǒng)導航AGV的占用率都(dōu)不是很高。
不過(guò),一方面(miàn),随著(zhe)自動駕駛的火爆,自動駕駛主要傳感器之一的激光傳感器(尤其是激光雷達)也變得香饽饽,爲搶先奪得市場,現各大傳感器公司正努力研發(fā)性價比高的激光傳感器。預計不久後(hòu),激光傳感器的價格會(huì)降下去,屆時激光導航AGV將(jiāng)擁有更大的優勢。
另一方面(miàn),視覺算法正高速發(fā)展,最好(hǎo)的例子就是特斯拉。随著(zhe)視覺算法的增強,未來視覺導航的效率會(huì)随之上升,視覺導航AGV應用也將(jiāng)更加廣泛。
所以,SLAM導航未來可期。
上一條:AGV按鈕功能(néng)介紹 下一條:AGV的核心技術有哪些?
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢