專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





随著(zhe)我國(guó)的制造業轉型升級步伐的加快,機械自動化代替人工勞動力也成(chéng)了當今的重點。相比以前,如今的物流及物料搬運形式已逐漸地由傳統人工搬運轉爲智能(néng)自動搬運形式,AGV 已是目前國(guó)内制造業應用最廣泛的搬運機器人之一。
AGV最早源于倉儲物流,其中的應用環境條件比較良好(hǎo),并且AGV的應用場地也有相關的标準定義。随著(zhe)智能(néng)物流的飛速發(fā)展,AGV現已涉足制造業、港口搬運、安防巡檢等領域,應用的領域範圍擴大意味著(zhe)運行場景的複雜度提升,因此,AGV的适應性能(néng)也應當提高。作爲AGV的适應結構之一的減震浮動結構,目前,其結構形式繁多,對(duì)于不同的 AGV 底盤形式、承載量,減震浮動結構也不同。本文通過(guò)列舉目前AGV 常見的減震浮動結構形式,加以研究分析其減震的特性,以對(duì)AGV 的懸挂浮動系統設計提供特性分析以及理論參考。
大體上來說,AGV的減震浮動結構是要使AGV獲得可以在複雜路面(miàn)上行駛的性能(néng),其具體發(fā)揮的作用:
(1)輪系共同著(zhe)地。在AGV具有多輪的布局輪系中,爲保證驅動輪著(zhe)地,一般的想法是將(jiāng)驅動單元安裝得比其他輔助輪凸出來以保證驅動輪的首先著(zhe)地。但如此一來。輔助輪實際并沒(méi)有與地面(miàn)貼緊,導緻更多的載荷施加到驅動單元上,降低了AGV的承載能(néng)力的同時,AGV的行駛穩定性也會(huì)降低。
那麼(me),在上述的基礎上,減震浮動結構使驅動單元具有上下壓縮的自由度。如圖1所示,在驅動輪外凸下,通過(guò)AGV的自重將(jiāng)驅動輪壓至與輔助輪平齊。通過(guò)減震浮動結構來實現多輪共同著(zhe)地問題,保證了AGV的驅動力外,輔助輪的著(zhe)地也分擔了一部分的承載。
(2)适應不平路面(miàn)。在AGV的作業環境中,路面(miàn)的不平會(huì)導緻驅動輪懸空以緻使AGV失去動力或被(bèi)頂起(qǐ)。減震浮動結構中的彈簧會(huì)使驅動輪始終與地面(miàn)貼緊,遇到凸起(qǐ)路面(miàn)時,由于驅動單元的浮動性以及彈簧的可壓縮性,可避免驅動單元帶動AGV整體被(bèi)頂起(qǐ)。彈簧的反作用力使驅動輪始終與地面(miàn)貼緊,地面(miàn)也時刻提供驅動輪支承力以保證具有足夠的附著(zhe)力,保證了AGV不會(huì)因路面(miàn)不平而失去動力。
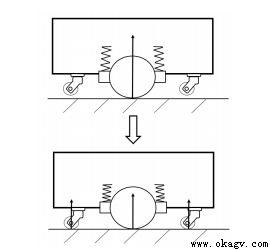
圖1 AGV自重將(jiāng)驅動輪壓至平齊
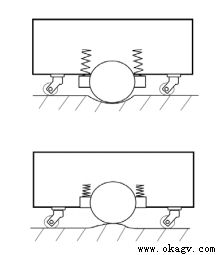
圖2 浮動結構的路面(miàn)适應性
(3)減緩沖擊力。路面(miàn)的不平以及行徑方向(xiàng)的障礙物會(huì)對(duì)驅動單元造成(chéng)沖擊,而減震彈簧將(jiāng)其沖擊吸收,有效緩解沖擊力對(duì)驅動單元的破壞,延長(cháng)驅動單元的使用壽命。
爲了保證減震浮動結構能(néng)發(fā)揮上述的具體功能(néng),其結構的設計應當滿足一定的條件,否則,會(huì)出現浮動剛度過(guò)大或過(guò)小所引起(qǐ)的功能(néng)失效。
現假定減震彈簧的所需剛度爲k、路面(miàn)起(qǐ)伏不平度爲±δ、驅動輪安裝外凸量爲λ。那麼(me),在分析減震浮動結構中,應當把AGV的作業路面(miàn)狀況分爲三種(zhǒng)來
具體分析:
(1)平地路面(miàn)。平地路面(miàn)是AGV作業時間最長(cháng)的工況,此時,AGV應該保證所有輪子共同著(zhe)地、各輪的承載在其額定承載範圍内、驅動輪的附著(zhe)力足以防止輪子打滑。
當AGV所處平地路面(miàn)時,即驅動輪與其他輔助輪處于平齊狀态,那麼(me),此時的減震彈簧相當于被(bèi)壓縮了外凸量λ,此時,驅動輪與地面(miàn)的作用力FN1爲:
FN1 = (Δ+λ)·nk
式中,Δ爲彈簧的安裝預壓量;n 爲彈簧數量。
在承載上須滿足:
FN1 ≤ Fmax1
FN2 ≤ Fmax2
FN2 = f(FN1,G)
式中,Fmax1驅動輪的額定負載;FN2平路上輔助輪的支承力;Fmax2爲輔助輪的額定負載;G爲AGV工作
整體重量;f(FN1,G)關于FN1和G的方程式,輪系結構的不同,其計算方程也不一樣(yàng)。
在驅動輪附著(zhe)力 Ff上須滿足:
Ff > Fq
Ff = FN1·μ1
Fq = G·μ2
式中,Fq爲AGV行走所需牽引力;μ1爲驅動輪與地面(miàn)的附著(zhe)系數;μ2爲AGV的滾動摩擦系數。
(2)凹陷路面(miàn)。在凹陷路面(miàn)中,爲使驅動輪貼緊地面(miàn),減震彈簧會(huì)將(jiāng)驅動輪頂緊地面(miàn),此時,彈簧相比平地路面(miàn)時形變量以及驅動輪的壓力均變小,而其他輔助輪的壓力變大。
從圖 3 的幾何關系可知,當 AGV 所處凹陷路面(miàn)時,此時,減震彈簧的壓縮量實際是外凸量與路面(miàn)不平度之差,由此可見,驅動輪的外凸量必須大于路面(miàn)不平度,
否則,在凹陷路面(miàn)時驅動輪會(huì)處于懸空狀态。
如果保證了AGV在平地中所有輪子共同著(zhe)地且驅動輪的外凸量大于路面(miàn)不平度,則AGV處于凹陷路面(miàn)時所有輪子也必定共同著(zhe)地,因此,需保證的是各輪的承載其承載範圍内、驅動輪的附著(zhe)力足以防止輪子打滑。
此時,驅動輪與地面(miàn)的作用力FN1'爲:
FN1 = (Δ+λ-δ)·nk
λ > δ
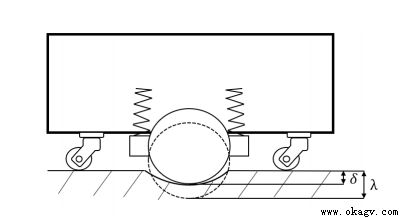
圖3 凹陷路面(miàn)時的彈簧形變量
相比平地路面(miàn)和凹陷路面(miàn),彈簧形變量減少,則驅動輪負載變小而輔助輪負載變大。由于凹陷路面(miàn)的工況頻率低于平地路面(miàn),即輔助輪的大負載工作時間較短,
此時,輔助輪負載處于其極限負載範圍内即可(如該工況頻率較高,則須處于額定負載範圍内),則減震浮動結構在承載上須滿足:
FN1' ≤ Fmax1'
FN2' ≤ Fmax2'
FN2' = f(FN1',G)
式中,FN2'爲凹陷路面(miàn)上輔助輪的支承力;Fmax2'爲輔助輪的極限負載;f(FN1',G)關于FN1'和G的方程式,輪系結構的不同,其計算方程也不一樣(yàng)。
在驅動輪附著(zhe)力Ff'上須滿足:
Ff' > Fq
Ff' = FN1'·μ1
(3)凸起(qǐ)路面(miàn)。在凸起(qǐ)路面(miàn)中,由于路面(miàn)外凸將(jiāng)驅動單元的減震彈簧壓縮,理論上減震彈簧的壓縮量會(huì)大于平地時的彈簧壓縮量。但如果彈簧在壓縮過(guò)程的彈力已經(jīng)足以支承 AGV 整體的重量時,那麼(me),彈簧不再壓縮,而是如同剛性連接一般將(jiāng)AGV整體頂起(qǐ)。如上述分析,此時,彈簧壓縮量最大,因此驅動輪的負載最大。
爲保證所有輪子共同著(zhe)地,應保證凸起(qǐ)壓縮彈簧時,彈簧的彈力不會(huì)將(jiāng)AGV整體支承起(qǐ)來,則驅動輪與地面(miàn)的作用力FN1"須滿足:
FN1" = (Δ+λ+δ)·nk
2FN1" < G [caption id="attachment_478" align="aligncenter" width="382"]
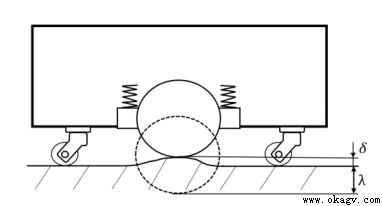
圖4 凸起(qǐ)路面(miàn)時的彈簧形變量[/caption]
凸起(qǐ)路面(miàn)中,此時,驅動輪負載最大,輔助輪的負載最小。由于凸起(qǐ)路面(miàn)的工況頻率依然低于平地路面(miàn),驅動輪僅短時間承受大負載,所承載的負載處于其極限負載範圍内即可。則減震浮動結構在承載上須滿足:
FN1" ≤ Fmax1'
FN2" ≤ Fmax2'
FN2" = f(FN1",G)
式中,Fmax1'爲驅動輪的極限負載;FN2"凸起(qǐ)路面(miàn)
上輔助輪的支承力;f(FN1",G)關于FN1"和G的方程式,輪系結構的不同,其計算方程也不一樣(yàng)。
(4)綜合條件。綜合上述(1)、(2)、(3)3種(zhǒng)工況下的條件,減震浮動結構需要滿足的綜合條件如下:
對(duì)于上述的綜合條件,每項條件都(dōu)可如上述分析構建起(qǐ)相關彈簧剛度的方程式以及範圍不等式,通過(guò)剛度的多個範圍條件,可确定出彈簧剛度在滿足所有條件
下的取值範圍。那麼(me),在用于減震浮動結構的彈簧的剛度應當處于該取值範圍内。
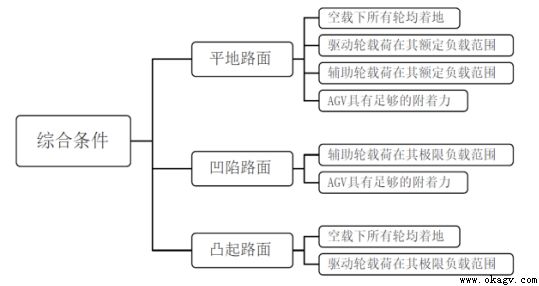
圖5 減震浮動結構的綜合條件
(1)鉸接擺動式。鉸接擺動式浮動結構是應用較多的一種(zhǒng)減震結構,如圖6所示,驅動輪與安裝座固定并與車體形成(chéng)鉸接,則驅動單元與車體間可繞鉸接點1旋轉擺動,實現上下方向(xiàng)的浮動。通過(guò)在驅動單元與車體間設置彈簧減震裝置,利用彈簧力來決定驅動單元的擺動幅度。
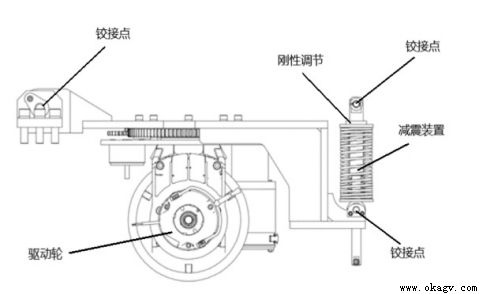
圖6 鉸接擺動式詳細結構圖
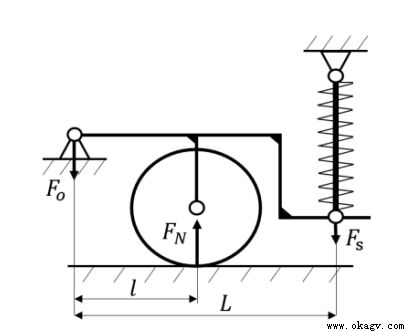
圖7 鉸接擺動式結構的受力圖
該類結構的驅動輪支承力與彈簧反力間存在力臂的關系(如圖7所示),在需要獲得一定的驅動輪支承力下,實際彈簧所需的彈力比驅動輪支承力更小。然而,浮動量剛好(hǎo)相反,在驅動單元需要獲得一定的浮動量時,彈簧的壓縮量需要比驅動單元浮動量的更大。
基于上述特性,鉸接擺動式浮動結構比較适用于大載荷、空間充足的AGV輪系布局上。力臂有效減小彈簧所需的剛度,但對(duì)擺動空間具有一定的要求。
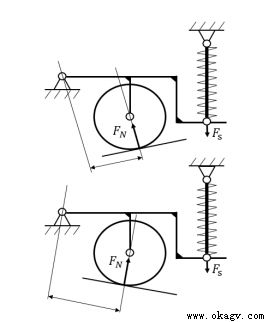
圖8 鉸接擺動式結構的雙向(xiàng)差異性
當AGV在坡道(dào)中行走時,其坡道(dào)方向(xiàng)如圖8的上圖所示,其驅動輪支承力與擺動鉸接點間力臂長(cháng)度相比另一方向(xiàng)(圖8的下圖)的要短。在彈簧的壓縮量一定時,即彈簧反力一定下,圖8上圖的驅動輪支承力更大,在AGV負載較大時,應當注意驗算驅動輪載荷是否處于額定範圍内。
(2)垂直導柱式。垂直導柱式浮動結構是通過(guò)驅動輪與安裝座固定,安裝座中設置有導套與導杆形成(chéng)移動副,導杆上設置有壓力彈簧的一種(zhǒng)減震結構。驅動單元通過(guò)導柱導套副實現上下浮動,壓力彈簧在垂直方向(xiàng)上給驅動單元提供豎直的反力。
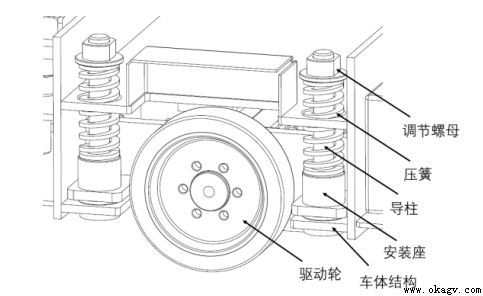
圖9 垂直導柱式詳細結構圖
該結構應當合理布置導柱與驅動輪間的位置關系,如圖10所示,爲避免因力分配不均勻的原因導緻導柱與導套間産生力矩,應將(jiāng)兩(liǎng)導柱相對(duì)驅動輪觸地點居中布置。若導柱沒(méi)有居中放置,兩(liǎng)邊的彈簧反力并不相等,造成(chéng)反力較大一端壓縮量較多,反力較小一端壓縮量較小,此時,導柱與導套間必然會(huì)産生力矩使移動副發(fā)生卡滞。
爲進(jìn)一步防止導柱與導套間發(fā)生卡滞,如圖11所示,兩(liǎng)導柱的中心連接線應處于驅動輪寬中心。如圖12所示,當兩(liǎng)導柱的中心連接線偏離驅動輪寬中心時,驅動輪的支承力與彈簧反力間存在力矩的力臂,在導套與導柱的配合面(miàn)上必定産生對(duì)頂力,使移動副發(fā)生卡滞。
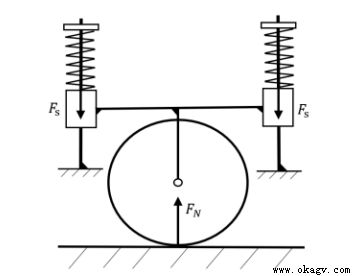
圖10 垂直導柱式結構的受力圖
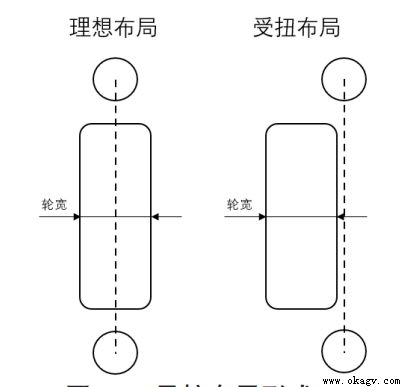
圖11 導柱布局形式
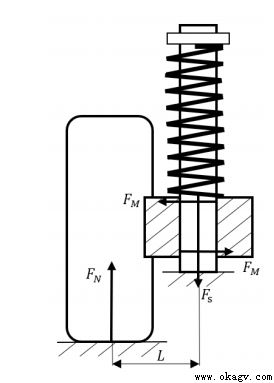
圖12 導柱偏移的受力情況
整體而言,垂直導柱式浮動的結構占用體積較小、結構簡單。從成(chéng)本方面(miàn)而言,是較爲經(jīng)濟的一種(zhǒng)減震結構,比較适用于對(duì)空間具有限制的輕中載輪系布局。
導柱的受扭卡滞是該結構的局限點,爲解決該問題,應當合理布局導柱與驅動輪的相對(duì)位置關系。在此同時,增加導柱與導套的配合長(cháng)度,可有效減小因受扭産生的對(duì)頂力,減小導柱導套的卡滞概率外,避免導柱受扭彎曲變形的可能(néng)。
(3)剪叉式。剪叉式浮動結構是基于剪叉舉升結構所延申出來的一種(zhǒng)減震結構。其中包含了剪叉式舉升結構的上下托架,中間通過(guò)剪叉進(jìn)行連接并在兩(liǎng)托架中間設置有減震彈簧。
該結構的減震浮動型式與剪叉式舉升相同,在遇到路面(miàn)不平整時,下托架會(huì)垂直向(xiàng)上壓縮并靠近上托架,同時,下托架與上托架間水平方向(xiàng)也會(huì)發(fā)生位移。
由于剪叉結構在高度空間的占用較大,此減震結構更多的是适用于差速單元模塊。其中,剪叉結構的中間部分的空間可以被(bèi)有效利用,差速驅動模塊在包含路面(miàn)适應功能(néng)外,其單元模塊還(hái)具備相對(duì)車體旋轉的轉向(xiàng)功能(néng)以提高AGV的轉向(xiàng)性能(néng)。因此,關于轉向(xiàng)的結構完全可以放置于剪叉結構的中間空間,以使得在具備減震以及轉向(xiàng)功能(néng)的同時節省更多的空間。
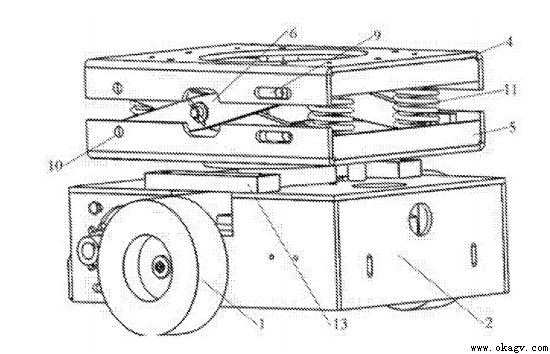
圖13 剪叉式浮動詳細結構圖
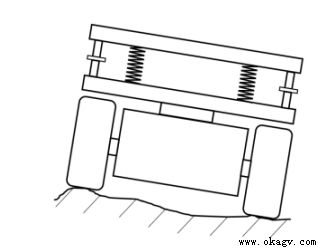
圖14 剪叉式浮動詳細結構圖
剪叉式浮動結構整體相對(duì)減震模塊而言體積占用較大,其更多是與差速轉向(xiàng)結構相結合,將(jiāng)兩(liǎng)者結構空間合并。其結構不适用于對(duì)空間要求較高以及帶有轉向(xiàng)功能(néng)的舵輪布局。
在路面(miàn)适應性中,剪叉式結構具有一定的局限性。如圖14所示,當兩(liǎng)驅動輪的路面(miàn)高度不一緻時,由于剪叉結構并沒(méi)有更多的自由度來适應兩(liǎng)側的高度不平,則使AGV整體被(bèi)傾斜地頂起(qǐ)。
(4)擺動橋式。擺動橋式結構通過(guò)整橋式將(jiāng)兩(liǎng)個輪子連接起(qǐ)來,以橋的中心作爲擺動中心與車體鉸接。擺動橋式的路面(miàn)适應結構常見于裝載機以及相關的工程機械中,通過(guò)釋放整橋的旋轉自由度來适應地面(miàn)的不平整。彈簧在該結構中主要起(qǐ)到了減緩沖擊的作用,在實際的應用中,若路面(miàn)僅僅隻是不平整而沒(méi)有給驅動單元帶來更多的沖擊,擺動橋式的浮動結構可以無須設置彈簧。地形的不平整使得兩(liǎng)輪的支承力離擺動中心的距離不一樣(yàng),則力臂較遠的輪子支承力小,力臂較短的輪子支承力大,浮動結構由此來适應路面(miàn)的不平。
對(duì)于一個擺動橋結構而言,兩(liǎng)個輪子始終通過(guò)擺動适應不平路面(miàn),實際可視爲將(jiāng)橋上兩(liǎng)個輪子變化爲整橋的1個大輪子。那麼(me),對(duì)于擺動橋式的四輪布局來說(圖 16所示),即將(jiāng)四輪布局變化爲三輪布局,在三點确定一個平面(miàn)的理論上,三個輪子必然接地,從而解決了所有輪子共同著(zhe)地的問題。
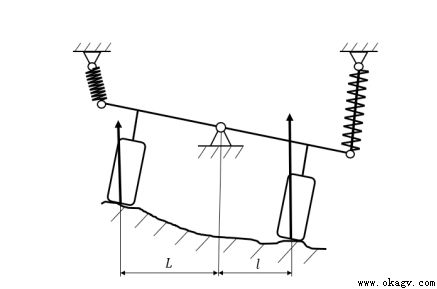
圖15 擺動橋式浮動結構簡圖
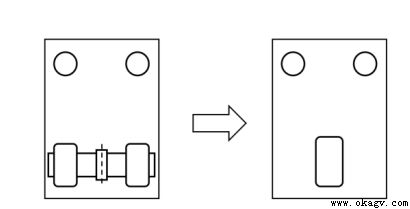
圖16 擺動橋的輪系演變
對(duì)于六輪布局等多輪系布局,通過(guò)擺動橋式結構實現路面(miàn)适應則需要設置更多組的擺動橋。由上述分析,一個擺動橋可視爲將(jiāng)兩(liǎng)個輪子變化爲1個輪子。由于三
輪必定接地,六輪布局須將(jiāng)六輪變化爲三輪,即需要3組擺動橋結構。
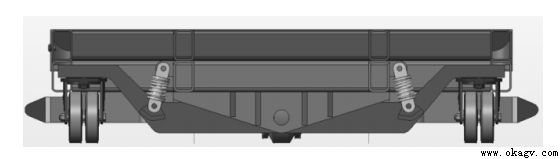
圖17 擺動橋結構具體應用
(5)四邊形式。四邊形式浮動結構是基于四連杆的擺動原理,在其基礎上增加減震彈簧,使其結構擺動時壓縮減震彈簧而實現的減震效果。
四邊形式浮動結構的減震型式比較類似于鉸接擺動式浮動結構,兩(liǎng)者均是通過(guò)繞著(zhe)鉸接點旋轉來壓縮減震彈簧從而起(qǐ)到減震效果,然而,這(zhè)兩(liǎng)者在運動結構以及受力上不全相同。
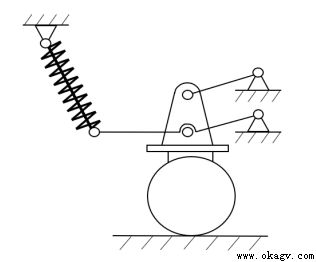
圖18 四邊形式浮動結構簡圖
如圖19 所示,四邊形式浮動結構的上下浮動方式是四連杆機構的擺動原理,而鉸接擺動式浮動結構的上下浮動方式是繞鉸接點作圓周運動的原理。
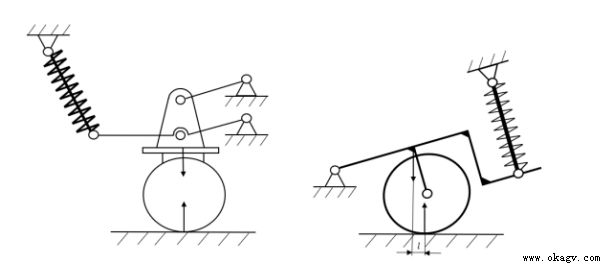
圖19 四邊形式與鉸接擺動式的受力對(duì)比
四連杆的擺動原理可實現驅動單元在浮動時其姿态不會(huì)發(fā)生改變,而鉸接擺動式結構的驅動單元在浮動過(guò)程其傾角會(huì)逐漸變化。傾角的變化使得驅動輪的支承力與安裝座的支反力間産生力臂,從而使驅動單元受扭。
表1 AGV常見減震浮動結構特點分析
四邊形式浮動結構在浮動過(guò)程中姿态不會(huì)發(fā)生改變,其驅動單元與安裝座間的力始終共線。
四邊形式浮動結構對(duì)豎直方向(xiàng)的空間要求較大,其結構相比鉸接擺動式結構複雜,此類結構一般應用于叉車式 AGV 的立式舵輪以及差速驅動中。
對(duì)AGV常見的減震浮動結構特點分析見于表1。從目前國(guó)内的 AGV 減震型式來看,大載重的舵輪布局更多的是采用鉸接擺動式浮動結構,對(duì)于載重較爲小的舵輪布局則采用垂直導柱式結構。對(duì)于差速驅動,對(duì)于路面(miàn)适應性要求較高的布局一般采用獨立懸挂的減震型式,其包括了鉸接擺動式、垂直導柱式、四邊形式。
AGV的主要輪系布局包含差速布局和舵輪布局,針對(duì)其布局的型式不同,其減震的結構方式也應當分析其影響的輕重。
參考文獻:
[1] 孫建民 . 工程車輛減震系統的關鍵技術探讨[J]. 築路機械與施工機械化 ,2011,(6):80-82.
[2] 馬越 , 王永恩 , 馬睿 . 重載 AGV 機械結構設計[J]. 機械研究與應用 ,2018(2).
[3] 呂王彪 , 劉昊 , 吳永海 . 浮動式驅動裝置及AGV[P]. 杭州:CN207257828U,2018-04-20.
[4] 周正軍 , 劉其信 , 盧輝文 . 一種(zhǒng)自動導航車的驅動懸挂裝置及自動導航車[P]. 廣東:CN106494257A,2017-03-15.
[5] 彭華明 , 朱忠 , 彭清華 , 曹睿 .AGV 舵輪驅動減震機構和AGV舵輪驅動裝置[P]. 廣東:CN206327106U,2017-07-14.
[6] 趙華東 , 徐一村 .AGV 剪刀叉式減震單元旋轉限位機構[P]. 廣東:CN206187160U,2017-05-24.文章來源于AGV吧
上一條:AGV智能(néng)倉儲機器人結構優化設計 下一條:AGV自由路徑導引介紹
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢