專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





無人搬運車(Automated Guided Vehicle,簡稱AGV)作爲自動化運輸搬運的重要工具,近年來的應用越來越廣泛。而導航導引技術作爲AGV的核心技術之一,對(duì)于AGV技術的發(fā)展起(qǐ)著(zhe)至關重要的作用,甚至有種(zhǒng)說法是“AGV技術發(fā)展史就是導航導引方式的演進(jìn)史”。AGV在工作過(guò)程中,隻有精确地定位自身所處的位置才能(néng)有效進(jìn)行作業。

AGV導航導引的關鍵技術
AGV的導航導引是指AGV根據路徑偏移量來控制速度和轉向(xiàng)角,從而保證AGV精确行駛到目标點的位置及航向(xiàng)的過(guò)程。主要涉及三大技術要點:
1.定位
定位是确定AGV在工作環境中相對(duì)于全局坐标的位置及航向(xiàng),是AGV導航導引的最基本環節。
2.環境感知與建模
爲了實現AGV自主移動,需要根據多種(zhǒng)傳感器識别多種(zhǒng)環境信息:如道(dào)路邊界、地面(miàn)情況、障礙物等。AGV通過(guò)環境感知确定前進(jìn)方向(xiàng)中的可達區域和不可達區域,确定在環境中的相對(duì)位置,以及對(duì)動态障礙物運動進(jìn)行預判,從而爲局部路徑規劃提供依據。
3.路徑規劃
根據AGV掌握環境信息的程度不同,可分爲兩(liǎng)種(zhǒng)類型:一個是基于環境信息已知的全局路徑規劃,另一個是基于傳感器信息的局部路徑規劃,後(hòu)者環境是未知或部分未知的,即障礙物的尺寸、形狀和位置等信息必須通過(guò)傳感器獲取。

常見的AGV導航導引方式
1.電磁導引(Wire Guidance)
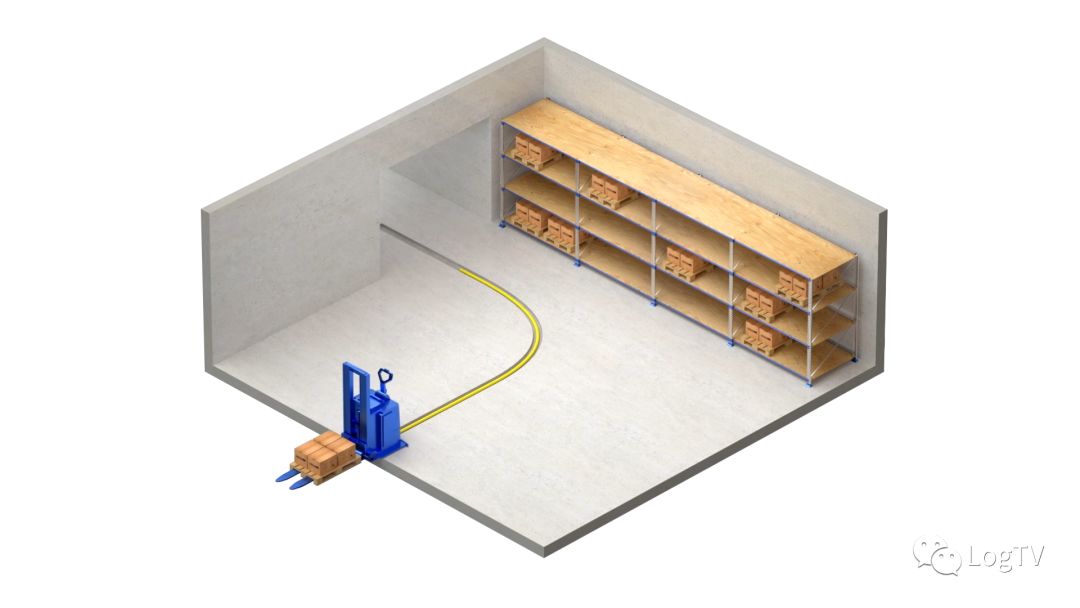
電磁導引是早期的AGV導航導引方式之一,技術比較成(chéng)熟。該技術是通過(guò)在地下埋設金屬線,AGV通過(guò)車載電磁傳感器感應金屬線發(fā)出的磁信号來實現導引。這(zhè)種(zhǒng)導引技術的優勢在于原理簡單,不受聲光幹擾,制造成(chéng)本低,埋藏的金屬線不易損壞。但是缺點同樣(yàng)明顯,首先是後(hòu)期難以擴展和更改路線,也無法在工作過(guò)程中實時更改任務,容易受到金屬等磁性物質的幹擾。
2.磁帶導引(Magnetic Tape Guidance)
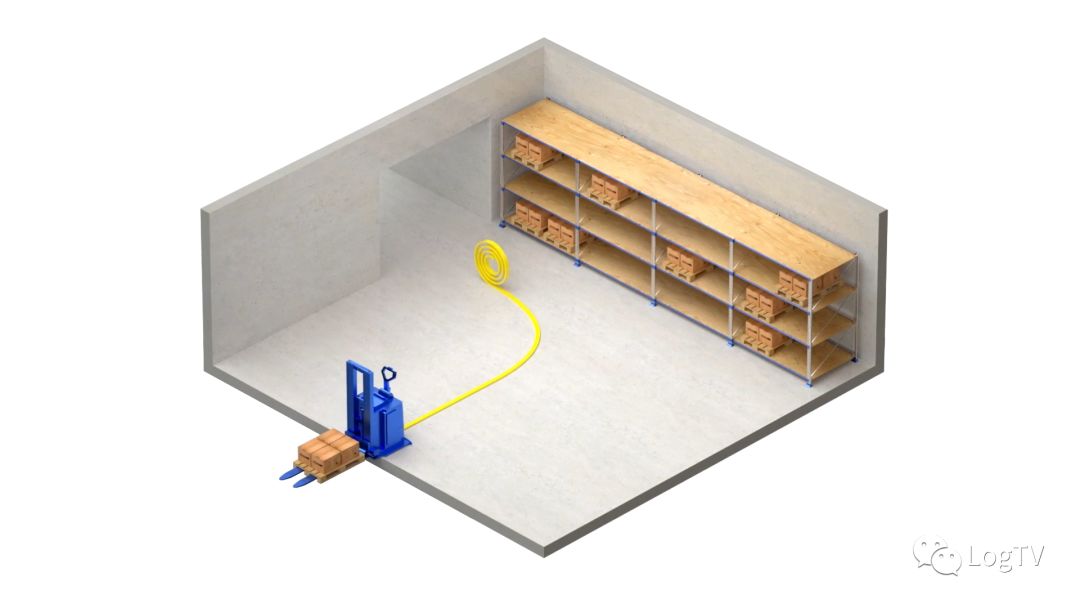
磁帶導引與電磁導引的原理類似,通過(guò)在地面(miàn)上鋪設磁帶的形式實現導引,靈活性比電磁導引較高,重新鋪設磁帶進(jìn)行二次變更也較容易。但是仍無法實時更改任務,AGV隻能(néng)沿磁帶行走,同樣(yàng)易受磁性物質幹擾。磁帶鋪設在地面(miàn)上,也容易受到損毀,需定期維護。
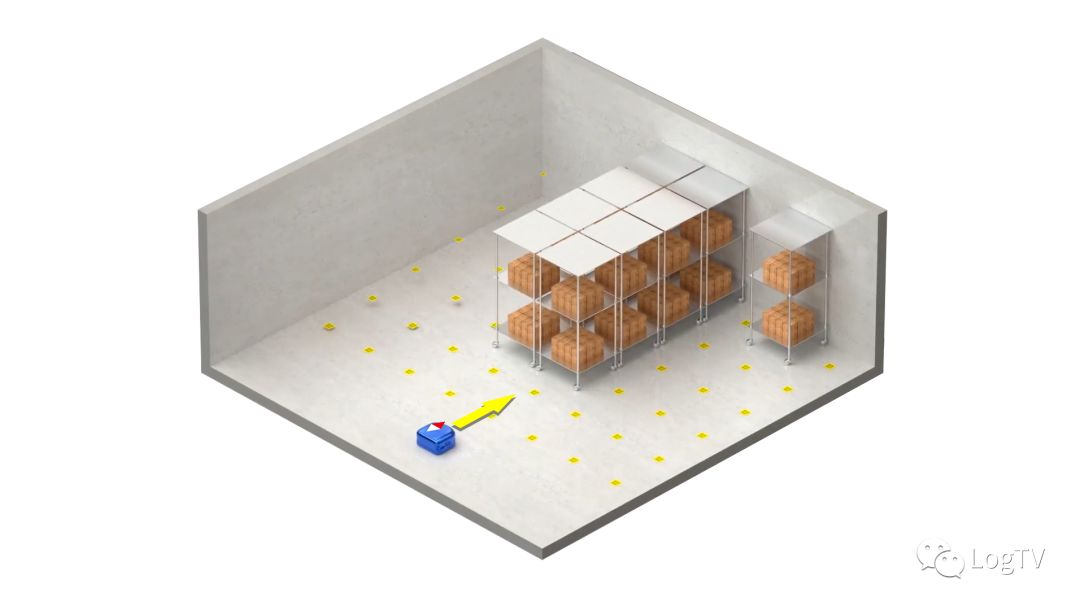
3.二維碼導引(QR code Guidance)
二維碼導引方式是通過(guò)離散鋪設QR二維碼,通過(guò)AGV車載攝像頭掃描解析二維碼獲取實時坐标。二維碼導引方式也是目前市面(miàn)上最常見的AGV導引方式,二維碼導引+慣性導航的複合導航形式也被(bèi)廣泛應用,亞馬遜的KIVA機器人就是通過(guò)這(zhè)種(zhǒng)導航方式實現自主移動的。這(zhè)種(zhǒng)方式相對(duì)靈活,鋪設和改變路徑也比較方便,缺點是二維碼易磨損,需定期維護。
4.慣性導航(Inertial Navigation)
慣性導航是在AGV上安裝陀螺儀,利用陀螺儀可以獲取AGV的三軸角速度和加速度,通過(guò)積分運算對(duì)AGV進(jìn)行導航定位,慣性導航優點是成(chéng)本低,短時間内精度高,但這(zhè)種(zhǒng)導航方式缺點也特别明顯,陀螺儀本身随著(zhe)時間增長(cháng),誤差會(huì)累積增大,直到丢失位置,堪稱是“絕對(duì)硬傷”。使得慣性導航通常作爲其他導航方式的輔助。如同上文所提到的二維碼導引+慣性導航的方式,就是在兩(liǎng)個二維碼之間的盲區使用慣性導航,通過(guò)二維碼時重新校正位置。
5.激光導航(Laser Navigation)
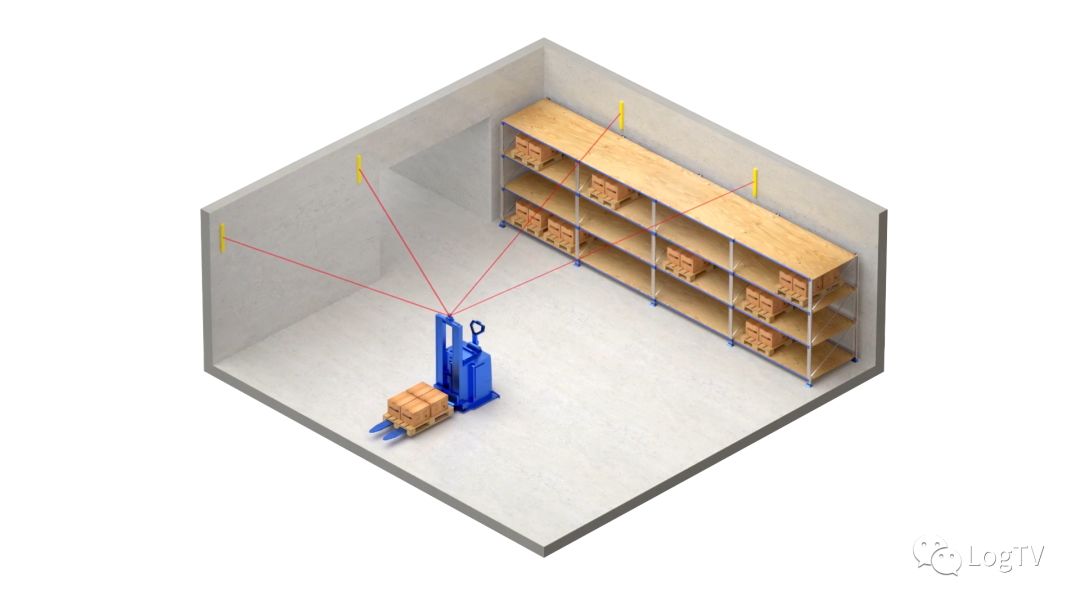
傳統激光導航的原理是在AGV行駛路線上安裝位置精确的反射闆,AGV的車載激光傳感器會(huì)在行走時發(fā)出激光束,激光束被(bèi)多組反射闆反射回來,接收器接收反射回來的激光并記錄其角度值,通過(guò)結合反射闆位置分析計算後(hòu),可以計算出AGV的準确坐标。其優勢在于無需地面(miàn)定位設施,靈活度高,缺點是制造成(chéng)本高,對(duì)環境要求較爲苛刻。
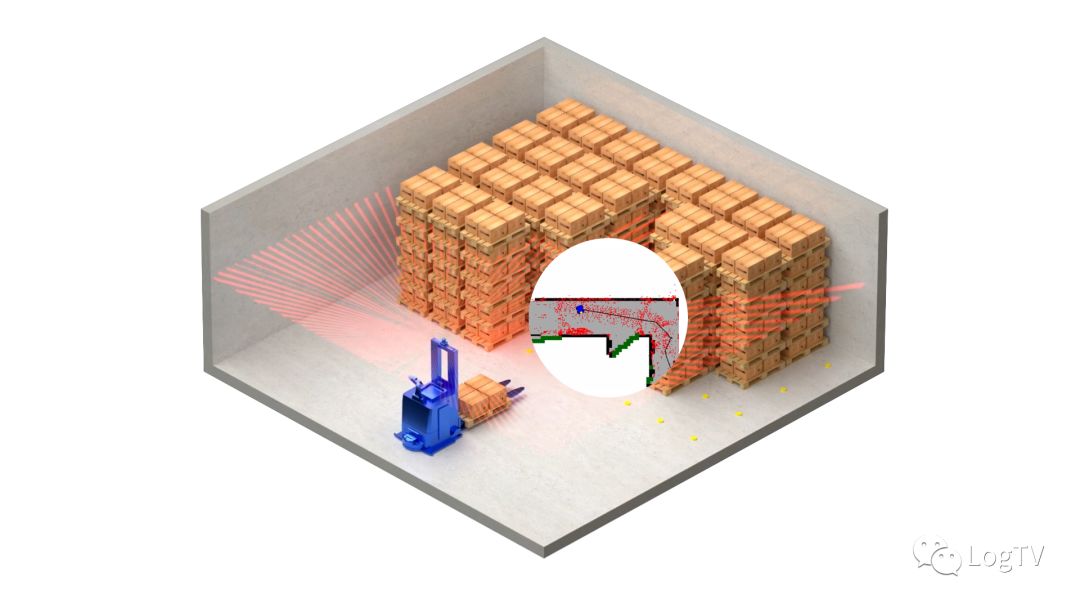
6.SLAM激光導航(自然導航)(Natural Navigation)
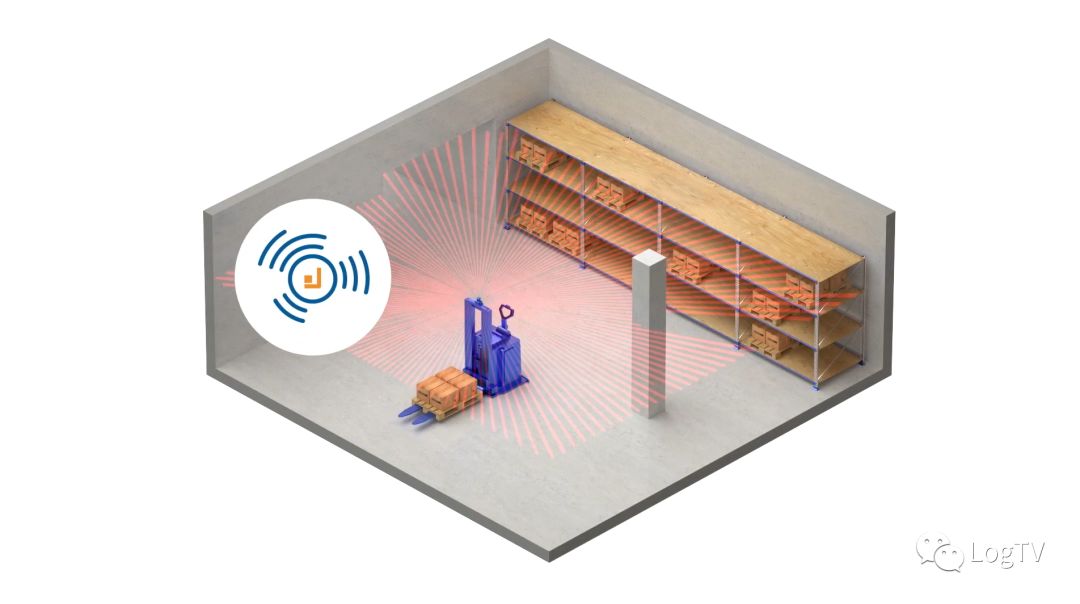
SLAM激光導航則是一種(zhǒng)無需使用反射闆的自然導航方式,它不再需要通過(guò)輔助導航标志(二維碼、反射闆等),而是通過(guò)工作場景中的自然環境,如:倉庫中的柱子、牆面(miàn)等作爲定位參照物以實現定位導航。相比于傳統的激光導航,它的優勢是制造成(chéng)本較低。據小編了解,目前也有廠商(如:SICK)研發(fā)了适用于AGV室外作業的激光傳感器。
7.視覺導航(Visual Navigation )
視覺導航也是基于SLAM算法的一種(zhǒng)導航方式,這(zhè)種(zhǒng)導航方式是通過(guò)車載視覺攝像頭采集運行區域的圖像信息,通過(guò)圖像信息的處理來進(jìn)行定位和導航。視覺導航具有高靈活性,适用範圍廣和成(chéng)本低等優點,但是目前技術成(chéng)熟度一般,利用車載視覺系統快速準确地實現路标識别這(zhè)一技術仍處于瓶頸階段。

AGV導航導引技術一直朝著(zhe)更高柔性、更高精度和更強适應性的方向(xiàng)發(fā)展,且對(duì)輔助導航标志的依賴性越來越低。像SLAM這(zhè)種(zhǒng)即時定位與地圖構建的自由路徑導航方式,無疑是未來的發(fā)展趨勢。相信在未來,5G、AI、雲計算、IoT等技術與智能(néng)機器人的交互融合,將(jiāng)給AGV行業帶來翻天覆地的變化,而具有更高柔性、更高精度和更強适應性的SLAM導航方式也將(jiāng)更适應複雜、多變的動态作業環境。
上一條:AGV調度系統詳細介紹 下一條:視覺V-SLAM導航AGV優缺點
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢