專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





自動導引車 AGV ( automated guided vehicle) 是指以各類電、磁、聲、光傳感器爲自動導引裝置,能(néng)夠按照預設導引路徑行駛的無人駕駛運輸車[1]. 随著(zhe)智慧工廠與智能(néng)物流的不斷發(fā)展,重載 AGV 有望成(chéng)爲智慧倉儲物流系統的關鍵角色,實現各生産環節物料的自動運輸,保證整個生産線高效運行[2-3].
AGV的導航定位精度和路徑調整能(néng)力是制約其在工業領域推廣應用的瓶頸[4].當前的導航方式主要有磁導航[5-6]、慣性導航[7]、激光導航[8]、視覺導航[9]等.
磁導航運用電磁感應原理,其導航元件多種(zhǒng)多樣(yàng),如地标磁釘[5]、電渦流線圈和射頻器件[6]等,雖然磁導航在AGV行業中應用廣泛,但其鋪設成(chéng)本較高,不便于後(hòu)期維護與調整,難以滿足現代化柔性生産過(guò)程中的重載轉運需求;慣性導航技術定位準确性高,靈活性強,但對(duì)控制算法的要求較高且容易受周圍環境的影響;激光導航需在AGV行駛路徑的周圍安裝激光反射闆,對(duì)安裝角度和位置都(dōu)有非常精确的要求,成(chéng)本較高,且易受環境幹擾,不适合環境複雜的工廠環境;視覺導航利用圖像處理技術進(jìn)行導航,應用于工業重載AGV經(jīng)濟成(chéng)本低、實用性強,但傳統的視覺導航方式大多采用色帶引導、掃碼定位方式,在實際應用中存在路徑鋪設複雜、色帶易受環境幹擾等問題.在實際運行過(guò)程中,AGV的運行軌迹容易因非線性因素和系統内、外部擾動影響而出現偏差.
爲了提高AGV系統控制精度,文獻[10]將(jiāng)PID與模糊控制相結合,采用模糊規則對(duì)PID控制參數進(jìn)行在線調整,雖然系統具有一定的魯棒性,但對(duì)複雜多變的應用環境适應性較差.文獻[11]提出的自适應反演滑模控制方法使系統響應更快,魯棒性更強,且具有良好(hǎo)的瞬時性能(néng),但用于重載AGV易出現抖振現象,直接影響控制效果.自抗擾控制 ADRC(active disturbance rejection control)技術在PID控制基礎上,將(jiāng)非線性因素和系統内、外部擾動視爲總擾動,通過(guò)構造擴張狀态觀測器對(duì)總擾動進(jìn)行實時估計與補償,消除各種(zhǒng)不确定因素的影響[12],具有控制參數少、收斂速度快、誤差補償效果好(hǎo)等優點.
基于此,本文拟采用3個獨立高速單目相機,對(duì)基于色帶引導和掃碼定位的傳統視覺導航方式重載AGV結構進(jìn)行改進(jìn),在AGV控制系統中采用ADRC控制策略對(duì)擾動進(jìn)行實時補償,以期提高AGV的運動靈活性和導航精度.
AGV運行時的導航靈活性和精度是評價其系統性能(néng)的關鍵因素. 導航的靈活性與導航方式和AGV結構有關,導航精度與AGV控制算法有直接聯系.
本文對(duì)采用傳統視覺導航方式的重載AGV結構進(jìn)行改進(jìn),將(jiāng)色帶引導和掃碼定位導航中的1個或2個單目高速相機改爲3個獨立單目高速相機(3C),且對(duì)其鋪設方式進(jìn)行優化,改進(jìn)後(hòu)的AGV無需色帶引導,隻需掃碼就可以實現導航,AGV運行靈活.在AGV控制算法上,采用ADRC策略對(duì)擾動進(jìn)行實時補償,以消除各種(zhǒng)不确定因素的影響,使AGV運行穩定、快速響應,能(néng)适用于複雜車間環境.經(jīng)過(guò)改進(jìn)的3C視覺導航重載AGV結構如圖1所示,其中AGV中心軸①—③位置安裝高速單目視覺相機,且相機1與相機2之間的中心距離和相機2與相機3之間的中心距離相等. 相機采用PGV光學(xué)相機,通過(guò)雙舵輪驅動設計,可實現原地360°轉彎; 爲避免沖突,在④—⑦位置上安裝激光避障雷達.
AGV控制系統結構如圖2所示,主要由電池管理模塊、避障模塊、3C 視覺導航模塊、伺服驅動與轉向(xiàng)模塊、車載控制模塊和上位機控制模塊等組成(chéng). 控制系統采用分布式控制,由兩(liǎng)級微機組成(chéng),車載控制模塊采用西門子S7-1200PLC,上位機控制模塊采用工控機,既可以實現單AGV獨立運行,又可以實現多AGV同時運行.
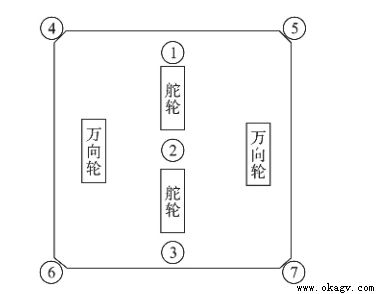
圖 1 改進(jìn)後(hòu)的3C視覺導航重載AGV結構
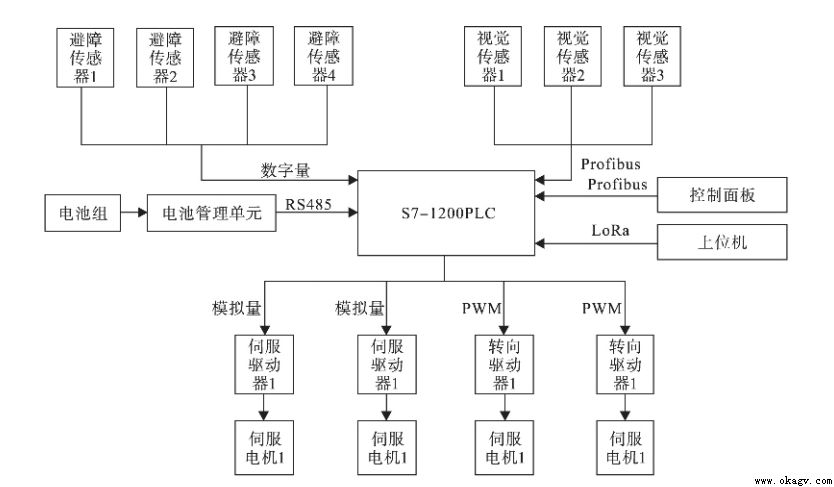
圖 2 AGV 控制系統結構圖
根據改進(jìn)後(hòu)AGV上3個相機分布的結構特點,設計數據矩陣碼的鋪設方式,相鄰兩(liǎng)個數據矩陣碼之間的中心距離與兩(liǎng)個相機之間中心距離相等.AGV導航示意圖見圖 3,其中編号5—8是鋪設在地面(miàn)上的數據矩陣碼.當AGV從站點5運動到站點6時,AGV運行分爲兩(liǎng)步:1)相機1與相機3同時分别掃描站點6與站點5的信息,AGV減速運行; 2) 當相機2中心位置與站點6中心位置坐标重合時,AGV停止.
在行進(jìn)過(guò)程中,AGV難免會(huì)出現軌迹誤差,因此爲保證AGV軌迹出現誤差後(hòu)能(néng)及時進(jìn)行修正,3個獨立相機在站點間運行時(即從矩陣碼進(jìn)入掃描區到離開(kāi)掃描區),不斷掃描站點誤差,并將(jiāng)掃描誤差信息實時傳遞給上位機.上位機控制算法對(duì)其軌迹進(jìn)行修正并下發(fā)給AGV進(jìn)行軌迹跟蹤,從而實現AGV導航.視覺相機在AGV中軸線上,AGV偏移量由數據矩陣碼偏差值和偏移角度組成(chéng).在AGV運行過(guò)程中,相機在某時刻掃描某數據矩陣碼時偏差和偏移角度如圖4所示.圖4以相機讀取區域建立局部坐标系,以工作車間建立全局坐标;由1,2,3,4組成(chéng)的正方形區域是數據矩陣碼,偏差角是α0.在AGV運行過(guò)程中,隻要有一個相機掃描到數據矩陣碼,前、後(hòu)舵輪就會(huì)同時自動地進(jìn)行誤差修正,這(zhè)種(zhǒng)修正方式較靈活,運算量較小.
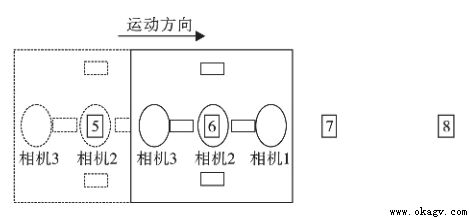
圖 3 AGV導航示意圖
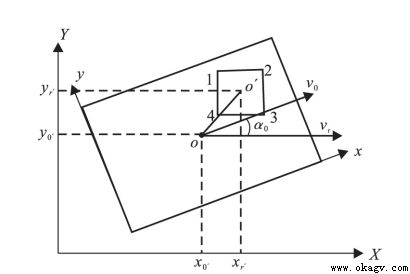
圖 4 掃描數據矩陣碼偏差和偏移角度示意圖
全局坐标下相機讀取區域中心位姿爲O(x0',y0',α0'),將(jiāng)其轉化爲AGV偏差位姿O(x0,y0,α0).數據矩陣碼中心位姿爲O'(xr',yr',αr'),將(jiāng)其轉化爲AGV期望位姿O'(xr,yr,αr).AGV期望軌迹運動學(xué)模型爲
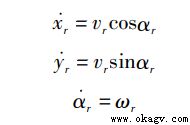
其中,vr爲期望速度,ωr爲期望角速度,αr值可爲0°,±90°,180°.將(jiāng)全局變量下位姿誤差轉換到局部變量下AGV位姿誤差公式[13]爲
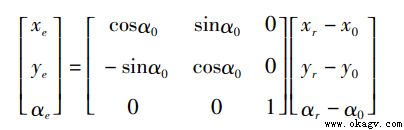
局部坐标下AGV位姿誤差微分方程爲
其中,v0爲AGV運行速度,ω0爲AGV運行角速度.
在AGV系統中,ADRC是用于上位機控制模塊的控制算法.通過(guò)3C視覺導航采集的坐标信息傳遞給上位機,經(jīng)過(guò)上位機中的ADRC跟蹤器進(jìn)行修正,將(jiāng)修正後(hòu)的坐标指令下發(fā)給PLC,再通過(guò)PLC對(duì)AGV進(jìn)行控制.
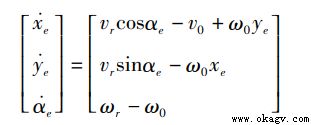
ADRC跟蹤器主要包含微分跟蹤器、擴張狀态觀察器和誤差反饋系統.微分跟蹤器( TD) 線性狀态方程爲
其中,r0 爲跟蹤速度因子,r0 越大跟蹤速度越快; f0爲輸入信号; f1,f2爲 f0的跟蹤信号.
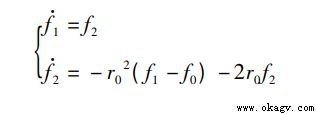
擴張狀态觀察器( ESO) 線性誤差方程爲
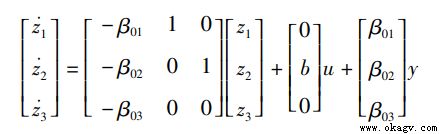
其中,u爲被(bèi)控系統輸入;y爲ADRC輸出;z1,z2,z3爲系統狀态變量估計值;β01,β02和β03爲設置參數;b爲控制量系數.誤差反饋控制系統中目标與輸出值之間的誤差及其微分誤差信号和被(bèi)控系統輸入,相應計算公式分别爲
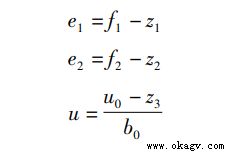
其中,e1是誤差,e2是微分誤差,b0爲可調參數,u0爲系統的控制律.
跟蹤控制器結構如圖5所示,AGV軌迹姿态誤差值[xe,ye,αe]T 是ADRC輸入,ADRC輸出是[xe,ye,αe]T,系統輸出是AGV實際運行姿态[x0,y0,α0]T,此時系統是三輸入三輸出,因此需要3個獨立ADRC控制器,將(jiāng)軌迹姿态誤差看成(chéng)3個單輸入單輸出系統.
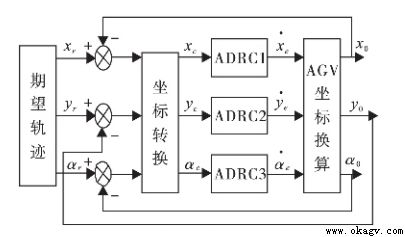
圖 5 AGV 軌迹跟蹤控制器結構
3個獨立 ADRC 的控制律 u0x,u0y,u0α爲
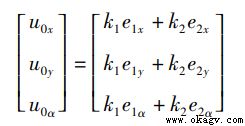
其中,k1和k2分别是比例和微分控制增益; e1x,e1y,e1α是3個獨立ADRC的姿态誤差; e2x,e2y,e2α是3個獨立ADRC的微分姿态誤差.
爲了驗證本文設計的基于ADRC的3C視覺導航重載AGV系統的性能(néng),以Matlab爲平台進(jìn)行仿真. 設定AGV速度爲1m/s,ADRC控制參數r0= 10,b0 = 1,w = 10,β01 = 30,β02 = 300,β03 = 1000,k1 = 5,k2 = 3. 圓形軌迹和直線軌迹跟蹤曲線與位姿誤差曲線分别如圖6和圖7所示,圖中軌迹跟蹤曲線橫、縱坐标表示AGV在全局坐标下的軌迹位置;位姿誤差曲線橫坐标表示AGV運行時間,縱坐标表示AGV在全局坐标下的位姿誤差.
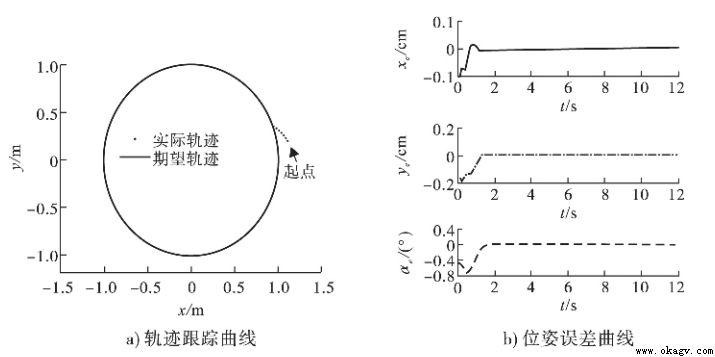
圖 6 圓形軌迹跟蹤與位姿誤差曲線
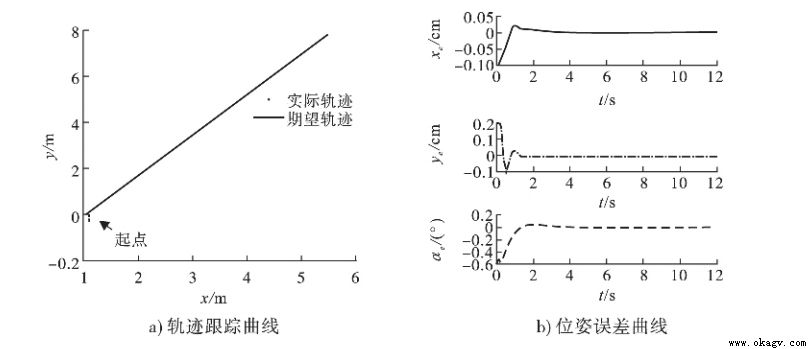
圖 7 直線軌迹跟蹤與位姿誤差曲線
由圖6和圖7可知,設置AGV起(qǐ)始位置在軌迹外,從初始時刻開(kāi)始,圓形軌迹中AGV能(néng)在1.9S時成(chéng)功跟蹤到給定的參考軌迹時成(chéng)功跟蹤到給定的參考軌迹;直線軌迹中 AGV能(néng)在3.9s時成(chéng)功跟蹤到給定的參考軌迹,說明基于ADRC的3C視覺導航重載AGV系統響應速度較快.運行穩定後(hòu),圓形軌迹中理想跟蹤位置誤差小于1mm,理想偏移角誤差趨近于0;直線軌迹中AGV理想跟蹤位置誤差和理想偏移角誤差趨近于0.因此,基于ADRC的3C視覺導航重載AGV系統能(néng)有效實現軌迹的實時跟蹤且導航精度較高.
爲了驗證本文基于ADRC的3C視覺導航重載AGV系統在實際應用中的運行情況,在現場進(jìn)行了實際運行測試.供測試用的AGV的長(cháng)度爲1.8m,車上安裝的兩(liǎng)個相鄰相機之間中心位置距離爲0.75m,因此鋪設在地面(miàn)上的相鄰兩(liǎng)個數據矩陣碼之間的中心距離也爲0.75m.設置的直線路徑中,路徑長(cháng)15m,共鋪設22個數據矩陣碼,爲進(jìn)一步測試其轉彎性能(néng),在路徑中的起(qǐ)始位置進(jìn)行原地零半徑轉彎.在0.5m/s,1.0m/s,1.5m/s,2.0m/s,2.5m/s和 3.0m/s速度下,分别記錄AGV前進(jìn)( 後(hòu)退)、原地左轉(右轉) 時的最大導航誤差和最大偏差角,重複進(jìn)行50次,然後(hòu)取平均值,結果見表 1 和表 2.
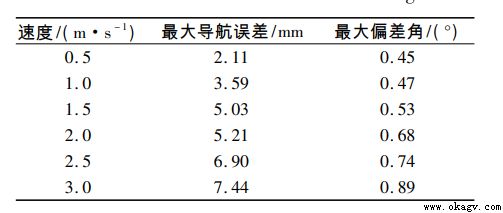
表 1 AGV 前進(jìn)( 後(hòu)退) 運行誤差
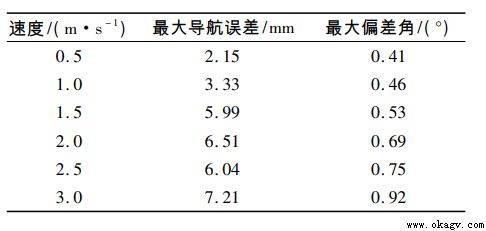
表 2 AGV 原地左( 右) 轉彎誤差
由表1和表2可知,在實際運行中,直行時最大導航誤差爲7.44mm,最大偏移角爲0.89°;原地90°轉彎時,最大導航誤差爲7.21mm,最大偏移角爲0.92°.該結果與仿真結果中的理想精度有一定差距,這(zhè)與實際的地面(miàn)平整度、光滑度、AGV車體的制造工藝等因素有關.由此可知,基于ADRC的3C視覺導航重載AGV系統最大導航誤差絕對(duì)值小于8mm,最大偏移角絕對(duì)值小于1°.此系統導航方式簡單,數據矩陣碼鋪設便利,導航精度高,AGV 運行穩定且靈活.
本文對(duì)基于色帶引導和掃碼定位的傳統視覺導航方式重載AGV結構進(jìn)行了改進(jìn),設計了基于ADRC的3C視覺導航重載AGV系統.該設計采用3個獨立單目相機,無需色帶引導,隻需鋪設數據矩陣碼即可實現導航,在導航控制算法中采用ADRC以有效消除各種(zhǒng)外界幹擾.仿真與實際應用結果表明,AGV運行穩定、靈活,響應速度快,最大導航誤差絕對(duì)值小于8mm,最大偏移角絕對(duì)值小于1°,在複雜車間環境下可實現軌迹的實時跟蹤,性能(néng)高于同類産品且制造成(chéng)本低,具有較高的工程實用價值.在該研究成(chéng)果的基礎上,下一步將(jiāng)在ADRC控制中引入人工智能(néng)算法,利用智能(néng)算法自動調節ADRC中需要設置的常數參數,將(jiāng)其變成(chéng)動态調整變量,進(jìn)一步提高ADRC收斂速度,減少所需參數設置,進(jìn)而提高AGV運行響應速度.
[1] BACIK J,DUROVSK YF,BIR0S M,et al. Pathfinder-development of automated guided vehicle for hospital logistics [J]. IEEE Access,2017,5: 26892.
[2] 過(guò)金超,趙海洋,蔣正柯,等. 雙向(xiàng)重載智能(néng)自主導航車系統設計[J]. 輕工學(xué)報,2017,32( 2) : 97.
[3] 高瑜,過(guò)金超,崔光照. 一種(zhǒng)改進(jìn)的多機器人路徑規劃自适應人工勢場法[J]. 鄭州輕工業學(xué)院學(xué)報( 自然科學(xué)版) ,2013,28( 6) : 77.
[4] 肖獻強,程亞兵,王家恩. 基于慣性和視覺複合導航的 AGV 研究與設計[J]. 中國(guó)機械工程,2019,30( 22) : 1.
[5] LEE S Y,YANG H W. Navigation of automated guided vehicle suing magnet spot guidance method [J]. Robotics & Computer Integrated Manufacturing,2012,28( 3) : 425.
[6] LU S,XU C,ZHONG R Y. A RFID-enabled positioning system automated guided vehicle for smart factories [J]. Journal of Manufacturing Systems,2017,44: 179.
[7] JUNG K,KIM J. Intelligent autonomous systems[M]. Berlin Heidelberg: Springer,2013: 807 -816.
[8] OSMAN K,GHOMMAM J,SAAD M. Vision based lane reference detection and tracking control of an automated guided vehicle [C]∥IEEE Control Systems Society. 2017 25th Mediterranean Conference on Control and Automation. Piscataway: IEEE,2017: 595.
[9] XU Z,HUANG S,DING J. A New positioning method for indoor laser navigation on under determined condition [C]∥IEEE Control Systems Society. 2016 Sixth International Conference on Instrumentation & Measurement,Computer,Communication and Control. Piseatamay: IEEE,2016: 703.文章來源于AGV吧
[10] 王琳華. 磁導式 AGV 自動導航車控制系統的設計[D]. 長(cháng)沙: 長(cháng)沙理工大學(xué),2013.
[11] 江亞峰,王彬彬,袁明新,等. 基于自适應反演滑模的全向(xiàng) AGV 運動控制[J]. 計算機仿真,2019,32( 2) : 348.
[12] 韓京清. 自抗擾控制技術———估計補償不确定因素的控制技術[M]. 北京: 國(guó)防工業出版社,2008: 197 - 207.
[13] 羅蕊. 基于自抗擾控制的移動機器人軌迹跟蹤[D]. 天津: 天津工業大學(xué),2018.
上一條:AGV驅動輪減震懸挂系統常見形式 下一條:設置AGV的路線與調度方法?
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢