專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





歐铠agv管制配置,顧名思義就是用于設定AGV在行走中交通管制點的配置。管制配置主要有三個地方的交通管制配置:常規交通管制參數配置、充電點特殊管制配置、任務替接點。如下圖19
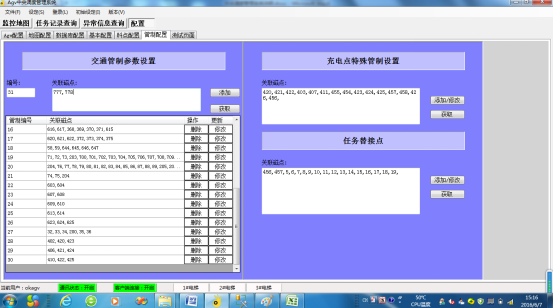
圖19 管制配置
常規交通管制配置,用于設定正常路線上管制點。交通管制的原理爲:在交通配置裡(lǐ)面(miàn)設定同一範圍内的磁點,軟件判斷哪一輛AGV先進(jìn)入該管制範圍,若有AGV進(jìn)入該範圍,則將(jiāng)該區域鎖定,直到該AGV走出此範圍再將(jiāng)其鎖定解除,允許其它AGV進(jìn)入。此管制方法相對(duì)比較靈活,也可使用嵌套的方式,實現多重互鎖。管制範圍可進(jìn)行添加、修改、删除操作。
上一條:AGV磁點如何設定? 下一條:歐铠無軌慣性導引AGV介紹
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢