專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





AGV系統的形象解釋
AGV系統的控制是通過(guò)物流上位調度系統、AGV地面(miàn)控制系統及AGV車載控制系統三者之間的相互協作來完成(chéng)的。對(duì)系統的理解,有一個非常恰當易懂的例子:
假設某市有一家出租車公司,該公司管理先進(jìn),每輛出租車都(dōu)裝有全球定位系統(GPS),公司的監控中心可以随時獲得每輛出租車的位置及行駛路線信息,出租車司機還(hái)可通過(guò)無線通信設備随時向(xiàng)公司彙報車輛的性能(néng)及服務狀況。
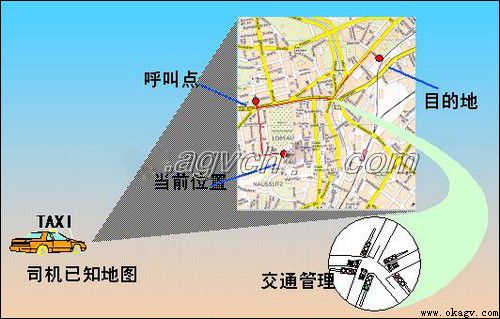
當有客戶需要乘坐出租車時,客戶可以打電話到出租車公司的客戶中心,并提供他當前的位置(A點)及目的地(B點)信息。在這(zhè)裡(lǐ),我們可將(jiāng)客戶的電話理解爲來自物流上位調度系統的需求,客戶中心理解爲AGV地面(miàn)控制系統,即AGV系統的上位控制系統。
客戶中心在收到客戶的信息後(hòu),可以選擇離客戶最近,又正好(hǎo)空閑的出租車(甲)前往A點接客,這(zhè)就像AGV的地面(miàn)控制系統進(jìn)行的任務調度和車輛分配;在出租車甲前往接客的途中,客戶中心可能(néng)又發(fā)現有其他空閑車輛(乙)距離客戶更近,那麼(me)客戶中心將(jiāng)會(huì)及時通知出租車乙去接客戶,并同時取消出租車甲的任務,這(zhè)就象是AGV地面(miàn)控制系統的動态任務調度。客戶中心對(duì)出租車將(jiāng)要行駛道(dào)路的交通狀況也了如指掌,能(néng)夠及時通知各個司機選擇最便捷的道(dào)路行駛,該道(dào)路所需時間最短,但不一定是路程最短,因爲,最近路程的道(dào)路上可能(néng)發(fā)生了交通阻塞,這(zhè)就象AGV地面(miàn)控制系統中的路徑搜索和路徑分配的功能(néng)。
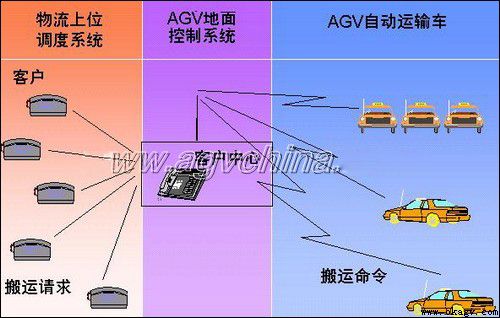
AGV系統的控制過(guò)程就類似這(zhè)樣(yàng)一家管理先進(jìn)的出租車公司,物流上位調度系統、AGV地面(miàn)控制系統和AGV車載控制系統分别相當于客戶、客戶中心和出租 車,AGV地面(miàn)控制系統和各台AGV之間通過(guò)無線通信來交換信息,調度AGV的作業,并爲其選擇路徑(線),确保交通通暢。AGV是以電池爲動力的,當電 量不足時,會(huì)向(xiàng)地面(miàn)控制系統發(fā)出充電請求,在得到允許後(hòu),前往充電站自動充電,在充電期間,AGV地面(miàn)控制系統不會(huì)向(xiàng)此AGV分配任何任務,就象出租車進(jìn)了加油站不再載客一樣(yàng)。
上一條:激光導引AGV系統介紹 下一條:AGV與AGC區别介紹
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢