專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





1 引言
自動導引車(AGV-Automated Guided Vehicle)是現代制造企業及物流系統中的重要設備,是一種(zhǒng)以微控制處理器爲核心,以蓄電池爲動力,裝有非接觸導向(xiàng)裝置的無人駕駛自動導向(xiàng)運載車。它可以按照監控系統下達的命令,根據預先設計的程序,依照車載傳感器确定的位置信息,沿著(zhe)規定的行駛路線和停靠位置自動駕駛。AGV具有運輸效率高、節能(néng)、工作可靠、無公害、柔性輸送等優點,已廣泛應用于許多領域。從超級市場、車間擴展到大型自動化倉庫、醫院及配送中心,AGV成(chéng)爲工業自動化的主要标志之一。本文利用縮小比例的模型車模拟實際生産線上的AGV,并采用紅外傳感器技術引導AGV移動。
2硬件系統設計
2.1整體設計
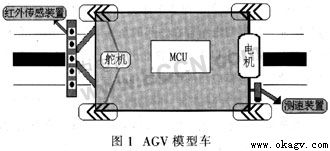
自動導引車包括車體、控制器、傳感器和動力裝置等4部分。其中,車體采用縮小比例的200 mm×300 mm、帶有差速器的後(hòu)輪驅動模型車模拟。控制器是以單片機MC9S12DG128爲核心,配合車體上的傳感器和動力裝置以控制AGV穩定運行。傳感器由測向(xiàng)的紅外傳感器和測速的霍爾傳感器組成(chéng)。動力裝置是由蓄電池驅動的直流電機和舵機構成(chéng),分别控制速度和轉向(xiàng)。這(zhè)4部分配以相應的驅動電路,能(néng)自主識别路徑,控制模型車穩定運行。AGV模型車如圖1所示。
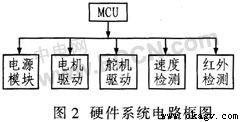
AGV與MCU可以看成(chéng)一個自動控制系統,是由傳感器、信息處理、控制算法、執行機構4部分組成(chéng)。其硬件部分是以單片機爲核心,配有傳感器、執行機構以及相應的驅動電路構成(chéng)控制系統;信息處理與控制算法則由控制軟件完成(chéng)。圖2所示是硬件系統電路框圖。
2.2 MCU介紹
AGV采用MC9S12DGl28作爲系統控制器,該器件内置128 KB的Flash、8 KB的RAM、2 KB的EEPROM,8個輸人捕捉和輸出比較通道(dào),2個8位或16位脈沖累加器,8路PWM波産生通道(dào),8路10位ADC通道(dào)或16路8位ADC通道(dào),2 個SCI、SPI通信接口,80~112個可編程I/O端口。
2.3電源模塊
AGV模型車的動力由7.2 V,2 A/h蓄電池提供。由于電路中的不同模塊所需的工作電壓、電流各不相同,因此需要多個穩壓電路將(jiāng)電池電壓轉化爲各模塊所需電壓。LM7805是串聯穩壓器,輸出電壓爲5 V,主要爲單片機、紅外傳感器、速度傳感器及部分接口電路提供電源。而LM1117-ADJ輸出爲2.85 V~6 V可調穩壓電源.通過(guò)電位器調節至6 V電壓爲舵機供電。蓄電池7.2 V電源直接爲ACV模型車後(hòu)輪電機供電。
2.4速度檢測模塊
速度傳感器使用CS3020型霍爾元件。霍爾元件使用方便,隻需一隻上拉電阻將(jiāng)輸出接至電源即可正常工作。在輪胎内側粘上4個磁鋼,在磁鋼正對(duì)方向(xiàng)選擇合适地方固定霍爾元件。當輪胎每轉動一圈,霍爾元件輸出4個信号,輪胎周長(cháng)爲17 cm,所以每兩(liǎng)個信号時間差爲T,AGV行駛4.25 cm。通過(guò)測量T,計算AGV的速度V=4.5 cm/T。
2.5紅外檢測模塊
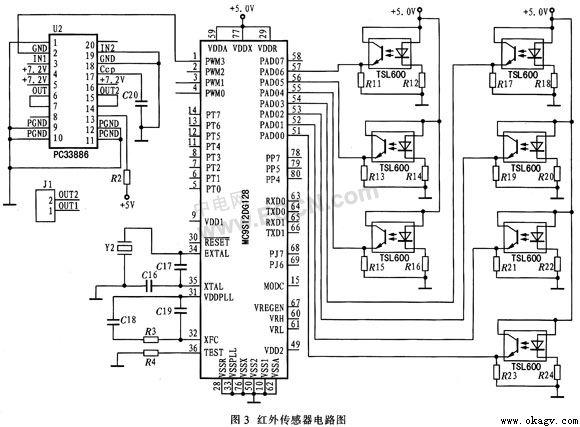
AGV模型車的引導方式爲超聲波引導、電磁感應引導、圖像識别引導、慣性導航、紅外傳感器引導等。由于紅外傳感器使用方便、價格低廉、引導精确、響應速度快等優點,因此本系統設計采用紅外傳感器技術引導AGV模型車行駛。選用發(fā)射功率大、接收靈敏度高的紅外傳感器是保證紅外檢測電路可靠工作的基礎。本系統設計的紅外傳感器選用反射式光電管TSL600。如圖3所示,右邊是紅外發(fā)光二極管和紅外接收三極管,其中,VCC爲+5 V,而R1=510 Ω和R2=20 kΩ爲限流電阻,OUT爲輸出信号。紅外發(fā)光二極管發(fā)射的紅外光根據反射介質色彩的深淺反射到接收三極管的光量不同。接收三極管是一種(zhǒng)光敏三極管,接收到的光量越多,輸出的電流越大。本設計在AGV模型車前10 cm處橫向(xiàng)安裝7對(duì)紅外傳感器,AGV中軸方向(xiàng)上安裝1對(duì),中軸左、右兩(liǎng)側各安裝3對(duì)。根據7對(duì)傳感器輸出的信号,判斷黑色引導線和AGV模型車的位置關系,爲引導轉向(xiàng)提供可靠的數據。紅外接收管接收道(dào)路反射的紅外光産生變化的電壓,反映賽道(dào)中心線的位置。紅外傳感器輸出量爲模拟量,通過(guò) MCU的ADC將(jiāng)模拟量轉換爲數字量,不僅簡化外部電路設計,同時保留紅外接收管的連續變化電壓信息,通過(guò)軟件算法得到更精确的位置信息并消除環境光線的影響。MC9S12DG128有8路10位ADC或16路8位ADC,考慮到8位有效值已滿足系統精度要求,本系統設計采用16路8位ADC中的7路通道(dào)。
2.6驅動控制模塊
電機啓動采用PC33886作爲驅動器,驅動電路原理如圖3左邊部分所示。MCU産生的PWM3通過(guò)IN1引腳輸入,以調節PC33886的 OUT1端口的輸出電壓,并且IN2接地使OUT2輸出爲0,使得OUT1和OUT2之間産生一個壓差,MCU通過(guò)改變PWM3的占空比來調節電機轉速。
3系統軟件設計
3.1控制算法
在連續控制系統中,按偏差的比例(P)、積分(I)、微分(D)進(jìn)行控制的PID控制算法獲得了廣泛的應用。這(zhè)種(zhǒng)數字PID控制算法結構簡單,參數易于調整,适應性強。本系統設計采用增量式數字PID控制算法,通過(guò)PWM調速直流電機。
3.2程序流程
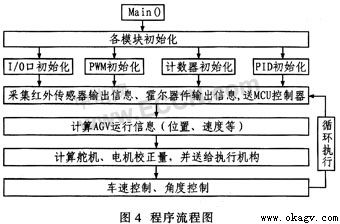
該系統的主程序流程圖如圖4所示。系統首先初始化設備,然後(hòu)進(jìn)人參數修改程序,參數設定完畢後(hòu)打開(kāi)中斷,最後(hòu)循環執行位置速度控制程序。
4 結束語
實驗是在5 000 min×6 000 mm的區域内搭建U型行駛道(dào)路中進(jìn)行,路中央劃有20 mm寬的黑色引導線。正常情況下,給定AGV模型車的速度上限爲1 m/s,AGV平穩行駛在引導線上,從出發(fā)點開(kāi)始,到識别出終點并停車,全程共耗時22 s;給定AGV模型車速度上限爲1.5 m/s時,AGV比較平穩地行駛在引導線上,全程共耗時16 s;給定AGV模型車速度上限爲2 m/s時,AGV行駛不穩定,在拐彎處有時會(huì)沖出引導線,全程共耗時12 s。根據以上實驗,AGV穩定工作的平均速度爲1 m/s。AGV不是競速車輛,工業現場一般以穩定、安全爲主要考慮因素,所以本設計的模型車在穩定方面(miàn)完全符合AGV車的規範,達到了自主引導、運輸效率高、節能(néng)、工作可靠、無公害等要求。
上一條:自然導引AGV在家電行業的應用 下一條: AGV在總裝車間的應用
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢