專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





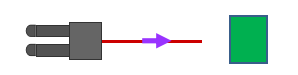
AGV的行走方向(xiàng)是貨叉始終在車體的後(hòu)面(miàn),依靠安裝在車體前方的障礙物傳感器監測功能(néng)可以有效的保障運輸安全。
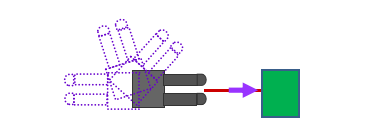
在AGV需要叉起(qǐ)貨物的時候,在離貨物較近的地方AGV通過(guò)原地旋轉將(jiāng)貨叉調整對(duì)貨物可叉方向(xiàng)行走。
注:AGV行走速度爲0-60M/MIN,且速度可在AGV觸摸屏上自行設置,但是考慮到AGV行駛途中遇到行人會(huì)暫停和原地90°旋轉、轉彎時減速等因素,一般AGV的平均速度爲35M/MIN。
上一條:歐铠AGV小車無線局域網配置要求 下一條:AGV安全防護功能(néng)介紹
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢