專業提供倉儲物流升級改造、無人搬運機器人産品
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860
一家專注複合機器人、全向(xiàng)激光AGV研發(fā)制造國(guó)家高新技術企業
全國(guó)服務熱線 400-007-3860





一、 案例概述:
本案例設計用于電子電器行業中電子産品從産線到倉庫的規範化上下架分類存儲。
本案例需要涉及到大重量的成(chéng)品運輸,以及規模化的堆高存儲,所以需采用多輛小型激光叉車配合控制調度系統一同工作。對(duì)産線上下來的成(chéng)品進(jìn)行,批量化、規範化的運輸到倉庫,并且自動搬運到貨架上進(jìn)行記錄存儲。
而且一輛叉車就能(néng)運載多個員工多次運載的貨物量。而且激光叉車與控制系統配合,可以對(duì)每次運載的貨物根據不同批次或者不同産品規則進(jìn)行分開(kāi)堆高存儲,并記錄産品所存儲的位置,方便以後(hòu)查找出貨。
采用智久激光叉車可全面(miàn)改善産線到倉庫成(chéng)品運輸的效率,減少企業在成(chéng)品運輸環節的大部分的人工成(chéng)本投入,減少我國(guó)人口紅利下降帶來的員工成(chéng)本過(guò)高,招工難等問題。解決原本采用機械叉車堆高存儲造成(chéng)的維護及消耗費用成(chéng)本過(guò)高,暴力運輸導緻貨物損壞等問題。使倉庫存儲更加智能(néng)化,改善原本雜亂無章的倉庫環境,更加合理的分配利用倉庫空間。
三、 解決方案
根據現場的勘察情況,AGV現場示意圖及系統規劃如下:
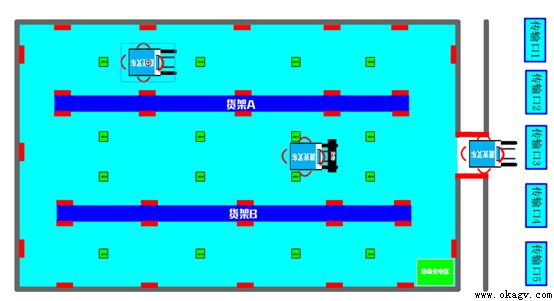
1. 線路說明與技術要點:
a) 激光叉車的工作流程
1.激光叉車小車在待命區待命,等待執行命令。
2.當成(chéng)品産線傳輸口區裡(lǐ)有成(chéng)品下線時,感應裝置自動向(xiàng)控制系統發(fā)送任務信息。
3.控制系統收到任務信息反饋後(hòu),會(huì)根據各輛激光叉車的位置進(jìn)行任務分配并規劃好(hǎo)叉車運行的路線以及貨物堆放的貨架号,計算完成(chéng)後(hòu)控制系統發(fā)出任務指令。
4.激光叉車利用自身裝配的網絡裝置,激光叉車接收到任務信息後(hòu),通過(guò)牆壁上貼有的反光裝條反射激光判斷路線與障礙物,出發(fā)前往産線傳輸裝載區。
5.激光叉車,通過(guò)預先設置好(hǎo)的路線到達成(chéng)品産線傳輸口區等待貨物下線,并對(duì)貨物進(jìn)行自動裝載,并沿著(zhe)控制系統規劃好(hǎo)的路線運載貨物回到倉庫。
6.激光叉車通過(guò)感應地面(miàn)上貼有的RFID标簽,對(duì)貨架的所在地進(jìn)行定位,并找到貨物所要堆放的貨架位置。

7.到達要存放的貨架前後(hòu),激光叉車先將(jiāng)貨物托高到所需的高度,將(jiāng)貨物放進(jìn)貨架中。并對(duì)貨架上的信息卡進(jìn)行信息讀寫,反饋給控制系統,對(duì)貨物的存放位置進(jìn)行記錄。
8.貨物上架完成(chéng)後(hòu),激光叉車退出貨架位置,繼續進(jìn)行下一個任務,或者回到服務區充電或者待命。
上一條:AGV機器人多代理路徑尋的四大研究方向(xiàng) 下一條:AGV小車導航技術比較分析
Copyright © 2012-2023 深圳麒豹機器人有限公司 版權所有
聯系電話
400-007-3860QQ咨詢
2448209188微信

微信咨詢